
ID : 2714
虚拟栅栏附近判定功能
这是在子局机器人上设定过虚拟栅栏时,当子局机器人接近虚拟栅栏时,在正在操作的COBOTTA侧发出反作用力的功能。
设定方法
COBOTTA侧的设定
1
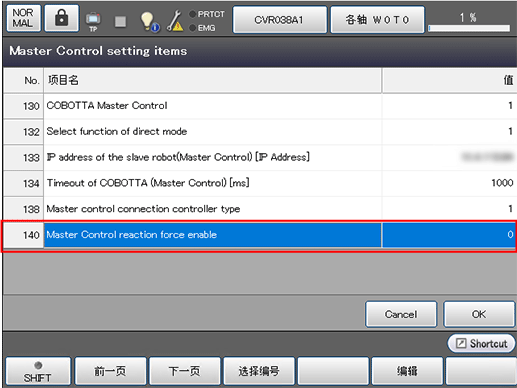
操作路径:[F6 设定] - [F10 COBOTTA] - [F8 主局设定]
在主局控制设定项目画面上选择No.140[主局控制反作用力发挥设定],按[F5 编辑]。
2
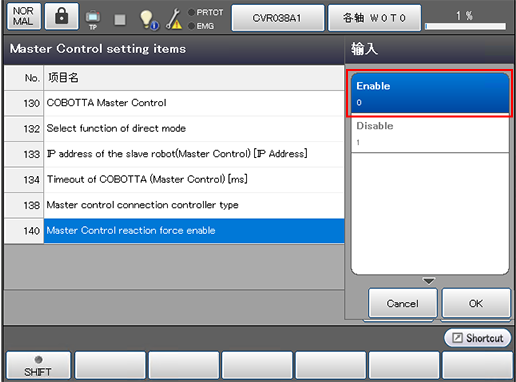
选择[0 : 有效],按[OK]按钮。
3
按[OK]按钮。

子局机器人侧的设定
假设虚拟栅栏的设定已完成。
虚拟栅栏的设定请参照“虚拟栅栏功能”。
1
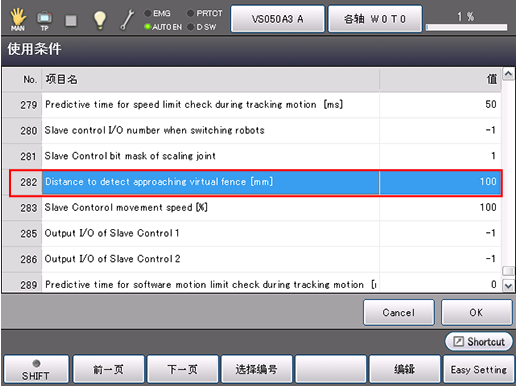
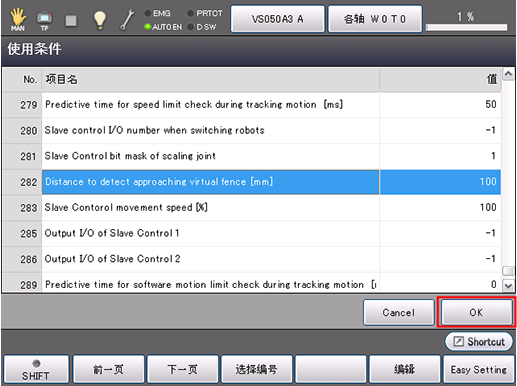
操作路径:[F2 机械臂] - [F6 辅助功能] - [F1 使用条件]
在使用条件画面上选择No.282[虚拟栅栏接近判定距离],单击[F5 编辑]。
2
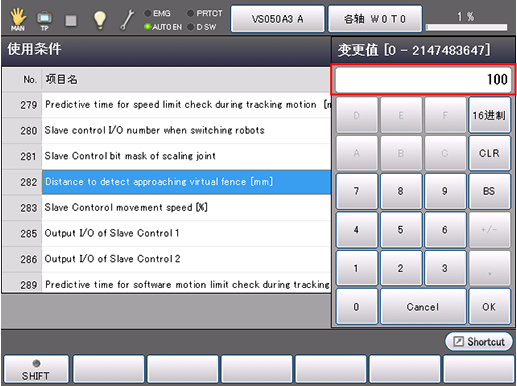
设定虚拟栅栏接近多少就发出反作用力的值。
设定完成后,按[OK]按钮。
3
按[OK]按钮。
ID : 2714