文字大小
<< 向前 下一页 >>
ID : 2500
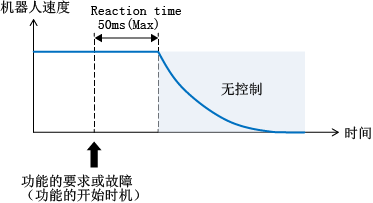
关闭机器人本体的电机电源的功能。 相当于IEC60204-1的停止范畴0。 机器人开始自由运行动作。机器人停止所用的时间与距离依存于系统的力学以及运动能量。