
ID : 2491
监视器
可以利用多功能教导器或者WINCAPSIII监视硬件以及I/O的状态。
多功能教导器
操作路径:[F2 机械臂] - [F12 保养] - [F5 安全动作] - [F1 监视器]
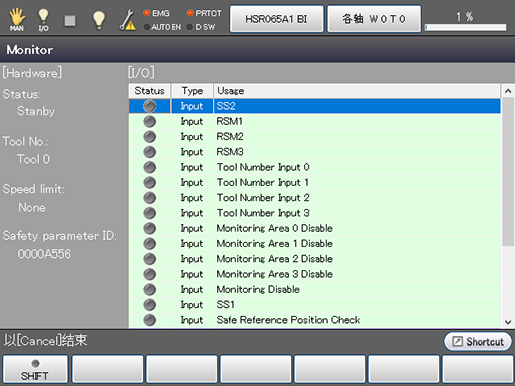
| 项目 | 内容 | |
|---|---|---|
| 硬件 | 状态 |
|
| 工具编号 |
|
|
| 速度限制 | 显示SS2输入(0mm/sec)、 RSM1~3中最慢的速度
手动模式时,不论如何显示,都限制为250mm/sec |
|
| 安全参数ID |
安全参数ID是根据安全参数的设定值而变化的固有的值。 确认发送至机器人控制器的安全参数有没有因为某种原因而变更了时使用。 使用示例如下所示。
无需确认安全参数的个别的设定值即可确认有无变更,十分方便。 安全参数ID在机器人控制器的软件版本为2.15.* 以上时显示。 |
|
| I/O | 显示各I/O的ON、OFF状态。 ON时,绿灯亮起。 |
|
WINCAPSIII
操作路径:菜单[显示] - [安全动作监视器]
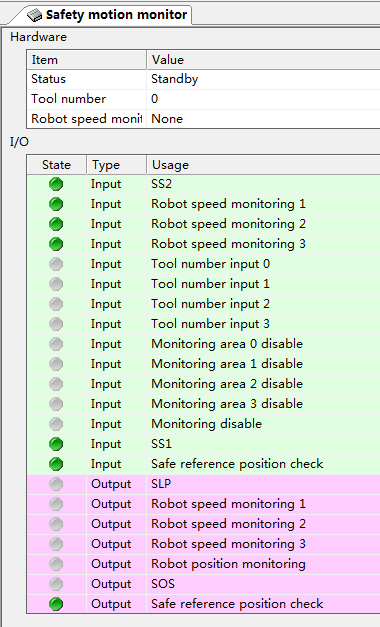
| 项目 | 值 | |
|---|---|---|
| 硬件状态 | 状态 |
|
| 工具编号 |
|
|
| Robot speed monitoring | 显示SS2输入(0mm/sec)、 RSM1~3中最慢的速度
手动模式时,不论如何显示,都限制为250mm/sec |
|
| I/O状态 | 显示各I/O的ON、OFF状态。ON时,绿灯亮起。 | |
ID : 2491