
ID : 2474
RSM输入
功能
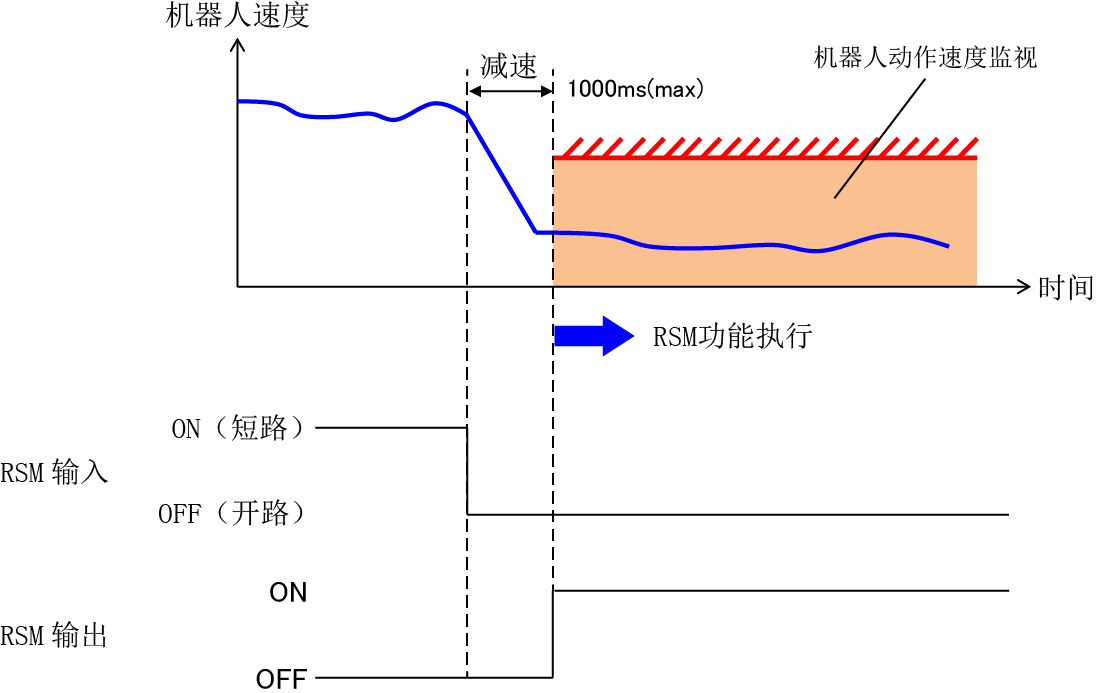
- 在自动模式下通过将RSM输入设成OFF(开路),从外部机器执行RSM功能。减速机器人,监视有没有超过规定速度限制值。
(2系统)
动作速度限制值因选择的输入而异。
信号名称 机器人动作速度限制值 RSM1输入 125mm/s RSM2输入 250mm/s RSM3输入 500mm/s - 在手动模式下,不论是否RSM输入,监视没有超过机器人动作速度限制值250mm/s。
端子编号
| 信号名称 | 端子编号 |
|---|---|
| RSM1输入(系统1) | Motion I/O Input的No.2、36 |
| RSM1输入(系统2) | Motion I/O Input的No.18、52 |
| RSM2输入(系统1) | Motion I/O Input的No.3、37 |
| RSM2输入(系统2) | Motion I/O Input的No.19、53 |
| RSM3输入(系统1) | Motion I/O Input的No.4、38 |
| RSM3输入(系统2) | Motion I/O Input的No.20、54 |
输入条件和动作
- 在自动模式下OFF(开路)时,限制、监视机器人动作速度。在手动模式、教导检查模式下,不进行任何RSM输入。
- 如果在自动模式下没有限制机器人动作速度,需要将该输入设成ON(短路)。
- 如果在自动模式下多个速度监视输入为OFF(开路),将以其中较低的速度限制值进行限制、监视。
- RSM输入2通路的状态有约0.5秒钟以上的异常时,判断为发生了某种异常,发生错误,切断电机电源。
- 请用各自的接点控制2个RSM输入。1个接点的2电路并联连接和1电路常短路,被判断为外部电路异常,不能动作。
状态图
ID : 2474