
ID : 2242
监视的开始/结束
可使用多功能教导器、小型教导器、指令结束或者开始监视。
开始控制器启动时的监视
如果预先将参数[366:虚拟栅栏设定]设为有效,在控制器启动时开始监视。
- 如果虚拟栅栏功能不处于有效状态,即使用多功能教导器、小型教导器、指令开始,也不开始监视。
- 变更了参数时,请重启。
用多功能教导器开始/结束监视
进行监视的开始/结束时,需要预先将参数的[366:虚拟栅栏设定]设为有效。
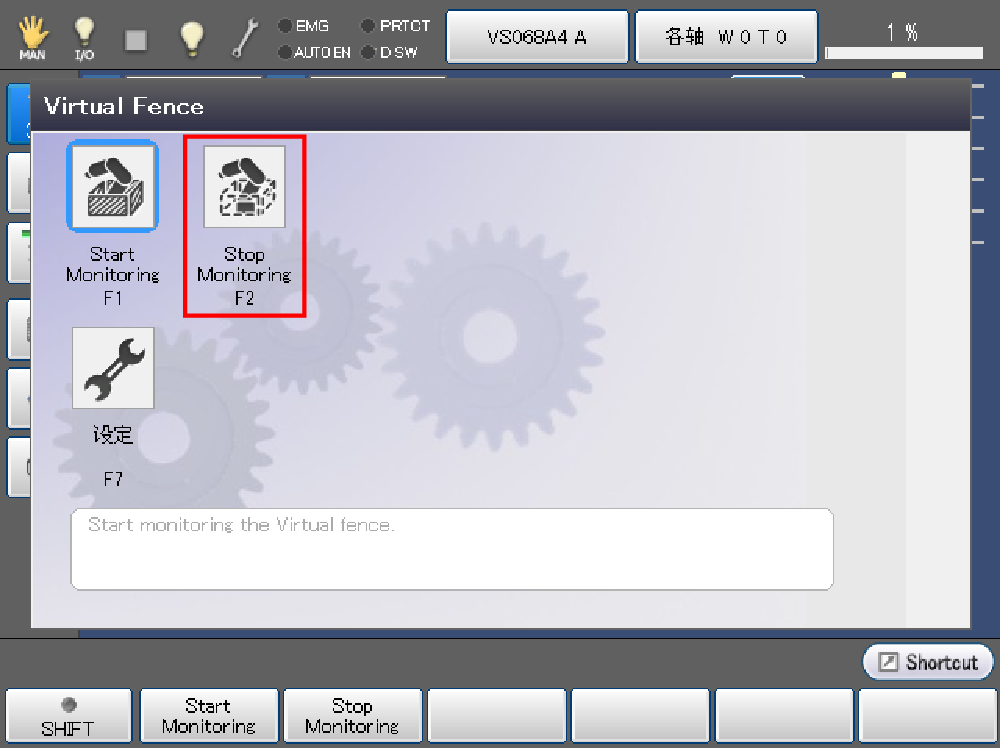
结束监视
操作路径:基本画面 - [F2 机械臂] - [F6 辅助功能] - [F2 碰撞/干涉]- [F2 虚拟栅栏]
通过[F2 监视结束]结束监视。
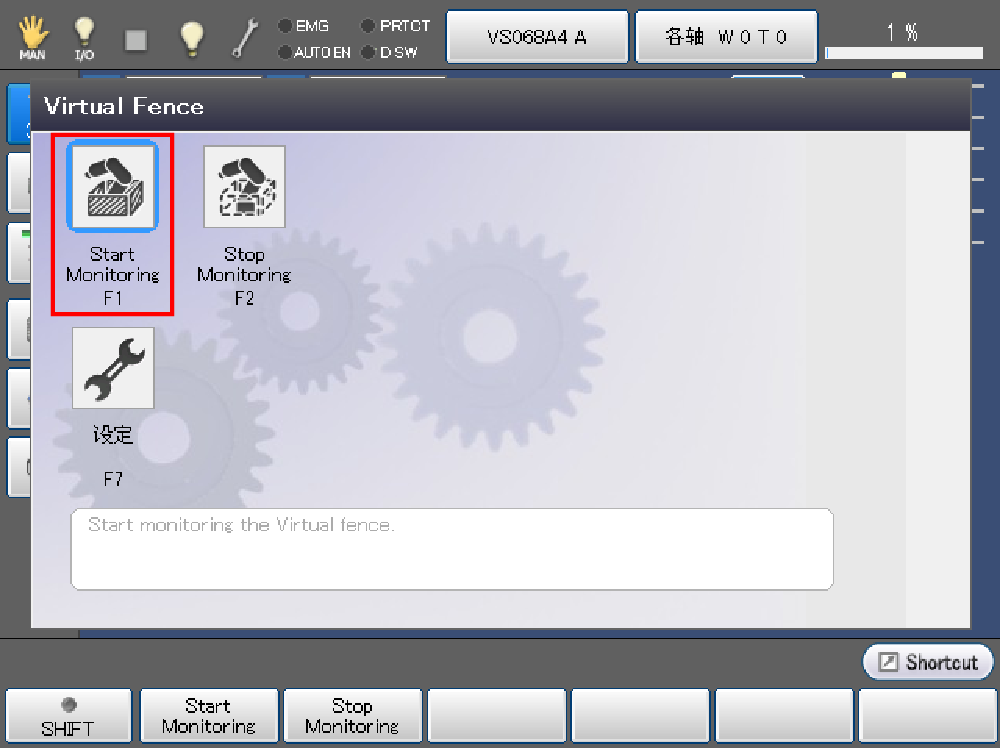
开始监视
要从没有监视的状态开始监视,按[F1 监视开始]。
用小型教导器开始/结束监视
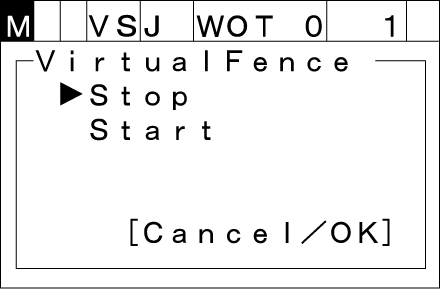
结束监视
操作路径:基本画面-[辅助功能]- [ArmAux] - [VF]
如果选择[Stop]后按OK按钮,结束监视。
开始监视
要从没有监视的状态开始监视,选择[Start]后按OK按钮。
用指令开始/结束监视
使用“VirtualFence”指令开始/结束监视。详细内容请参照“VirtualFence”。
干涉时的回避方法
当监视对象发生干涉时,请用多功能教导器或者小型教导器暂时结束监视模型的监视,通过手动操作避让机器人后,用多功能教导器或者小型教导器重新开始监视模型的监视。
ID : 2242