
ID : 2272
行走轴
要使机器人和附加轴联动时,使用WINCAPSIII的对应轴功能创建行走轴模型。
创建行走轴模型的方法
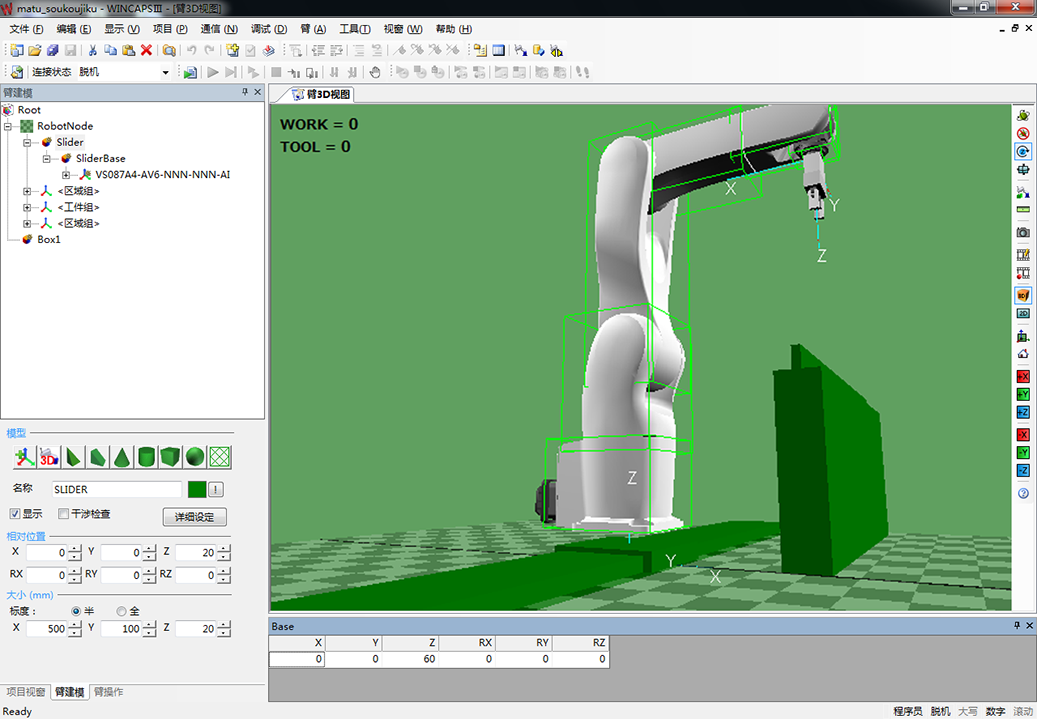
在臂建模层级的RobotNode与机器人模型之间设定对象,为使设定的对象作为附加轴动作而设定。
在此为Slider设置SliderBase,设想机器人置于其上的模型。设置的SliderBase创建作为J7轴朝X轴方向移动的行走轴模型。
1
选择RobotNode,追加Slider对象。
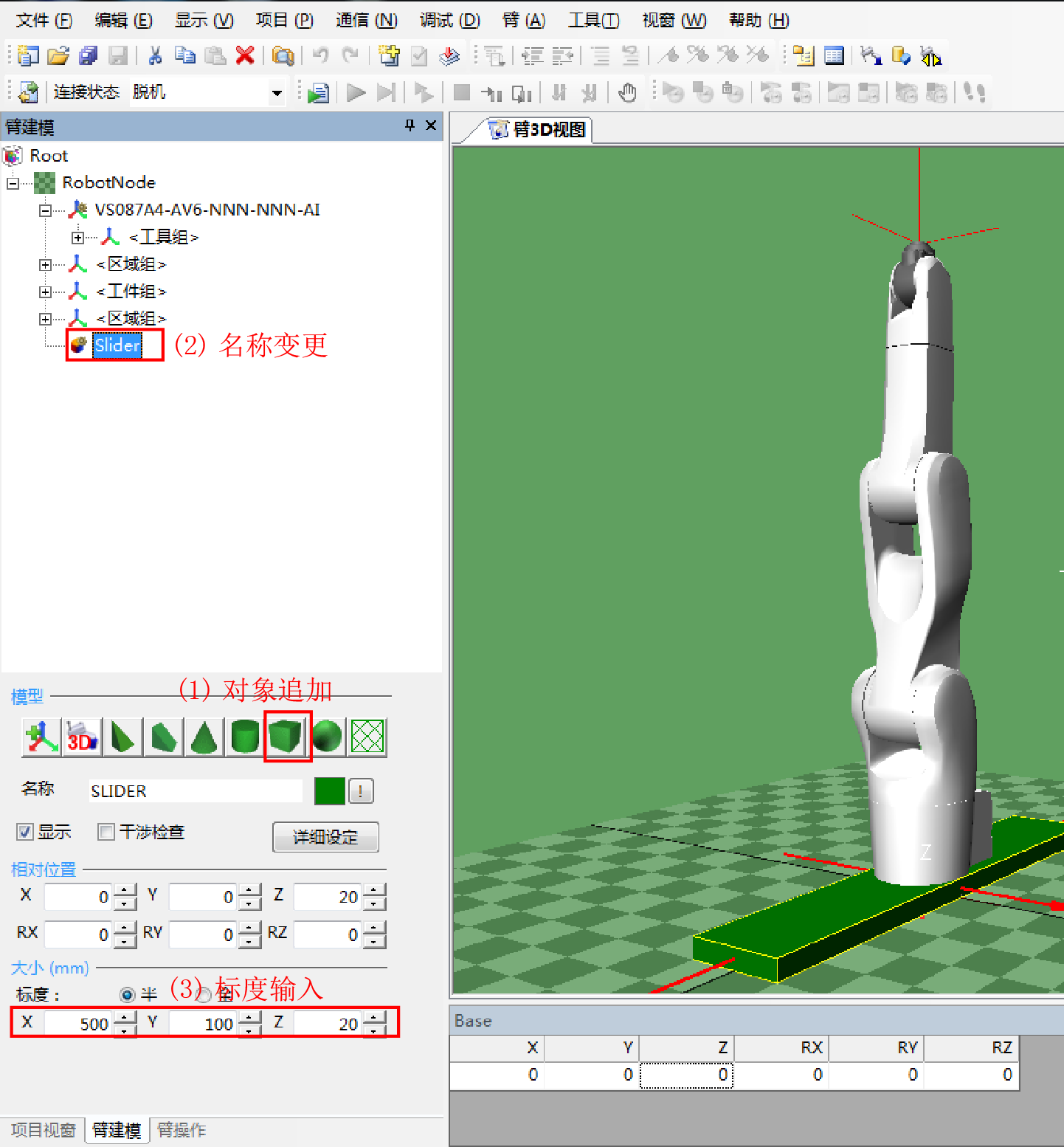
2
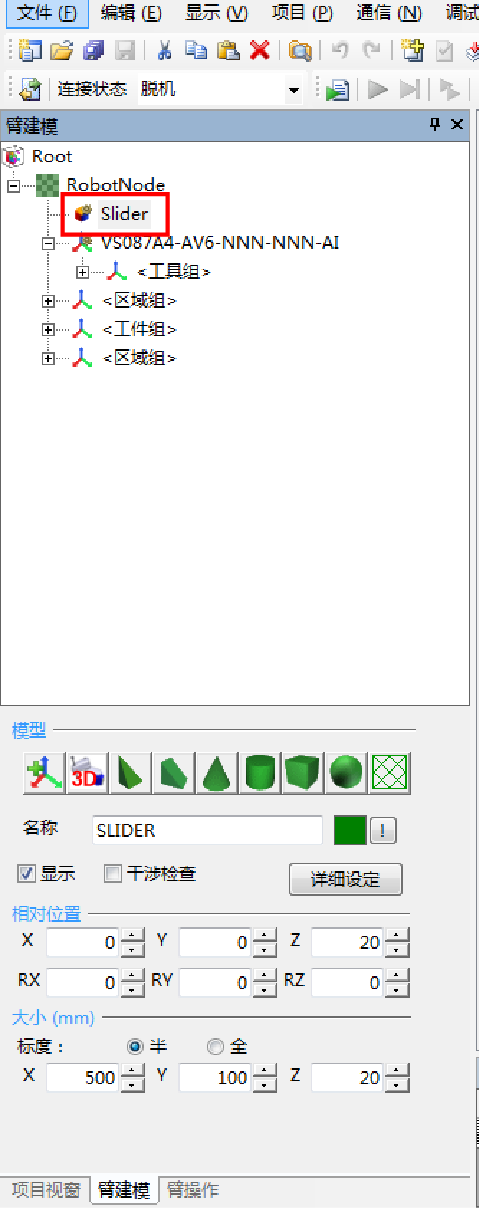
使Slider对象在RobotNode与机器人模型之间移动。
3
在RobotNode对象下面追加SliderBase对象。
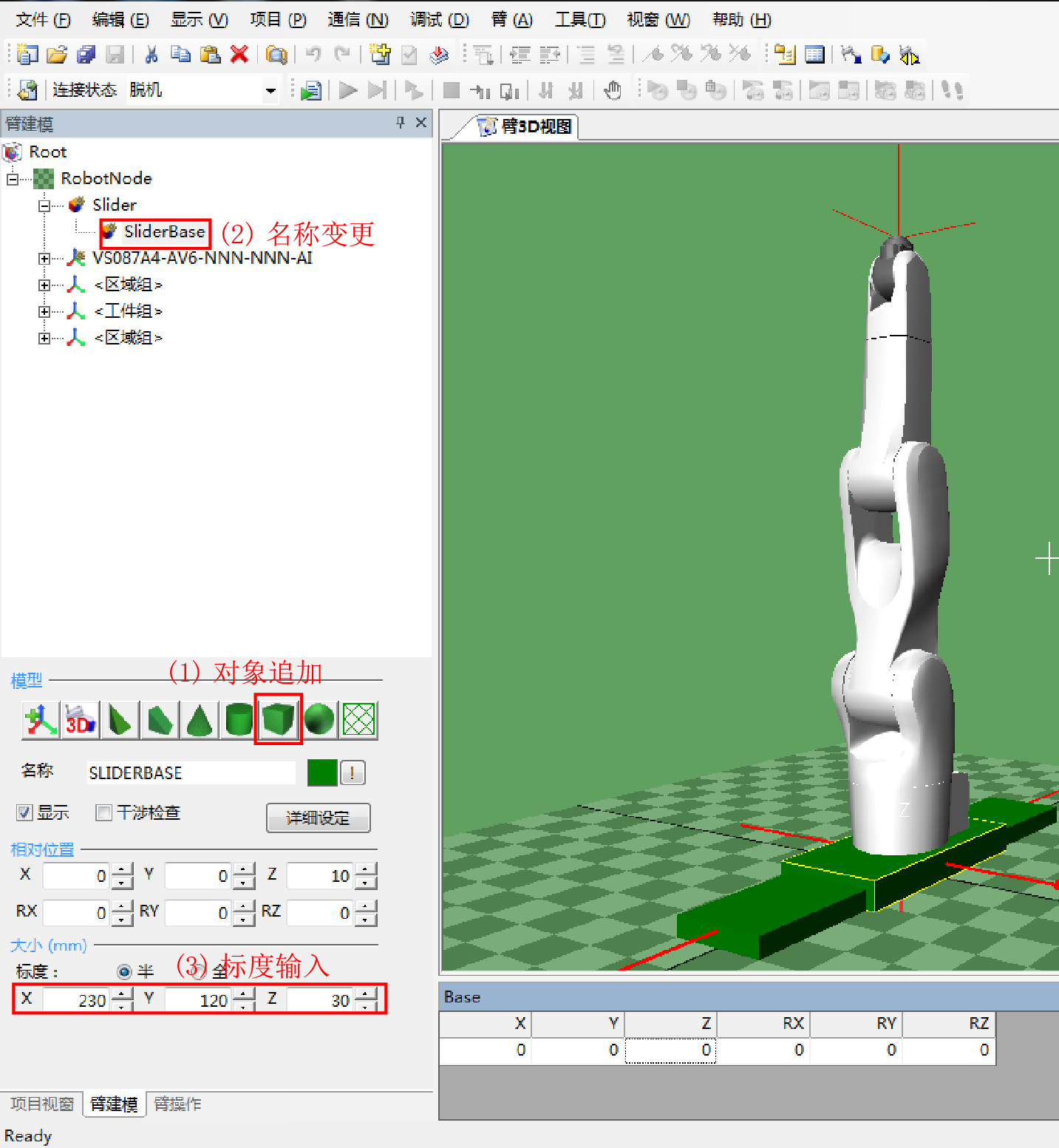
4
如果选择SliderBase对象后右击,显示视窗。
如果按“移动机械臂”,机器人对象移到SliderBase的下面。

5
要将机器人对象放在SliderBase上,需要变更Z轴方向的位置。
由于不能变更机器人对象的相对位置,变更基础坐标。
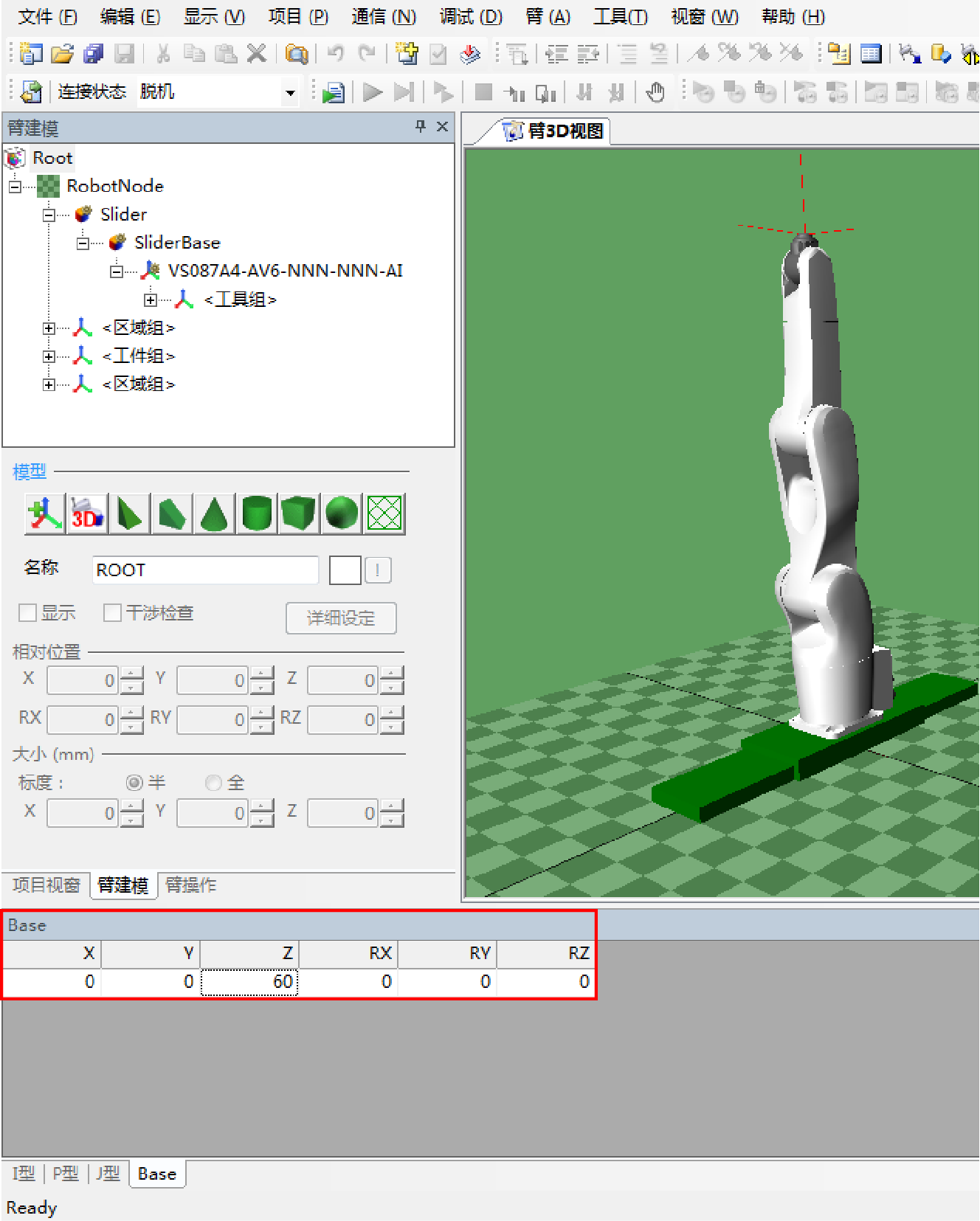
6
选择想使其联动的轴,通过“详细设定”打开“模型详细设定”,设定“对应轴”。
在此为使J7轴朝X轴方向移到而设定。
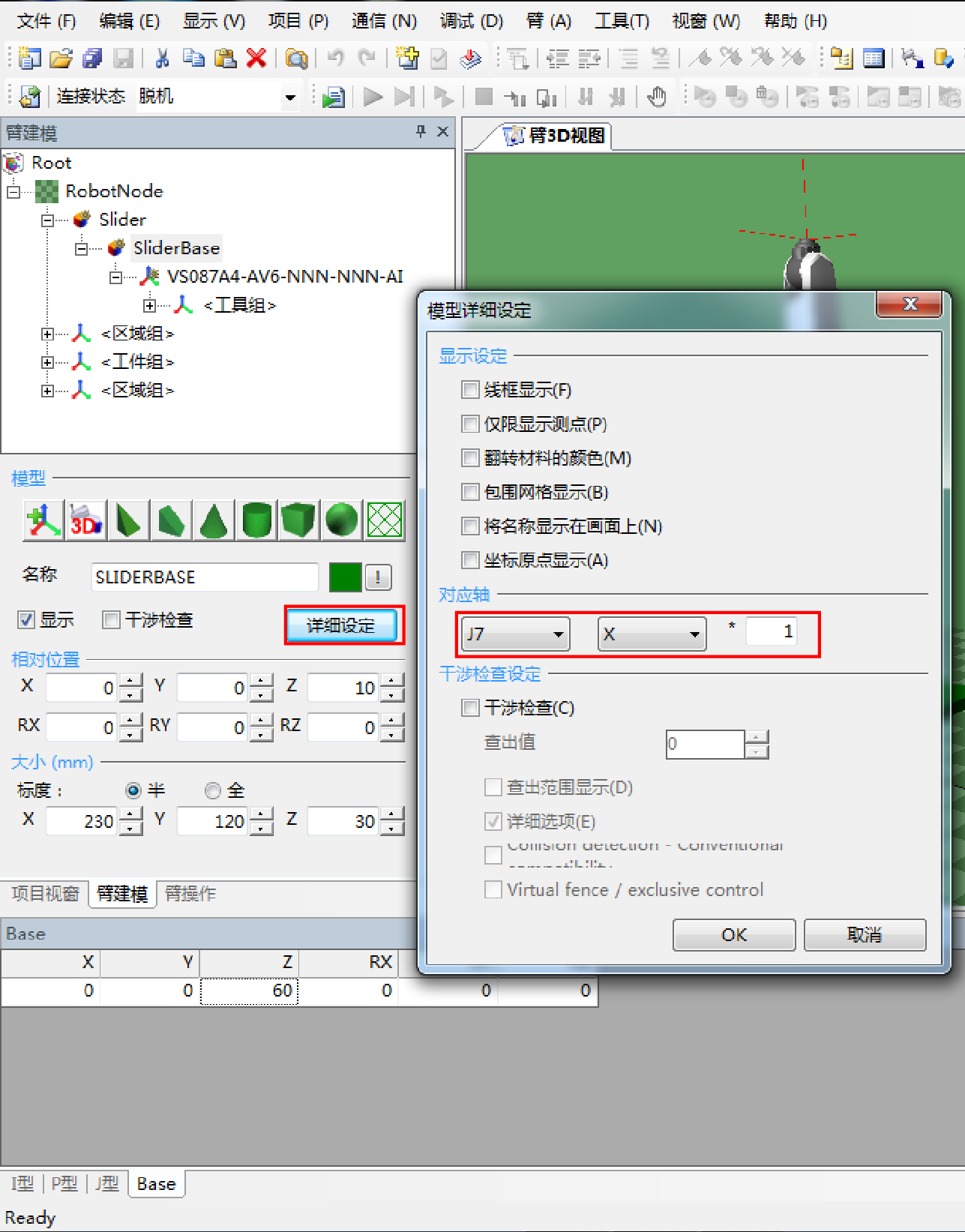
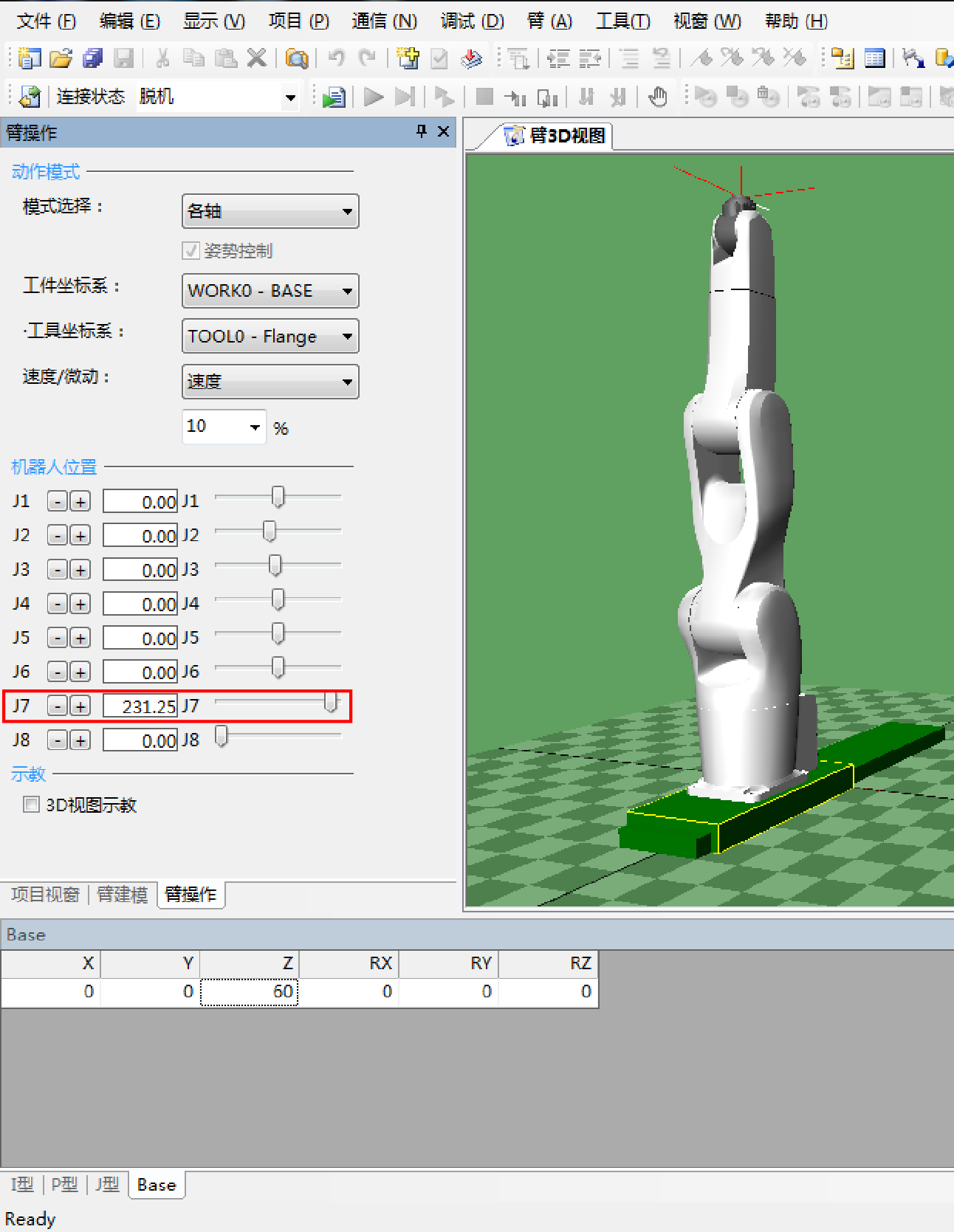
7
通过机械臂操作进行J7的动作确认,完成。
ID : 2272