
ID : 2008
多台机器人的连续位置获取
就将多台机器人的位置分别写入指定变量的方法进行说明。
“获取位置”画面之前的操作与前导机器人位置获取的STEP1~2相同。
3
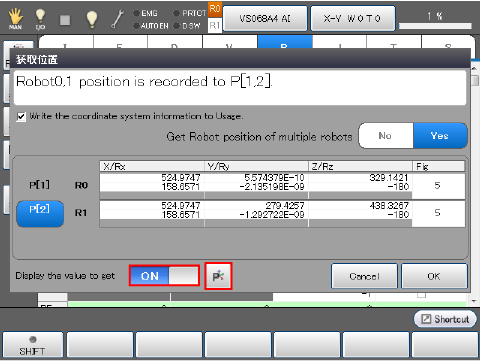
将多台机器人位置获取设定为“是”。
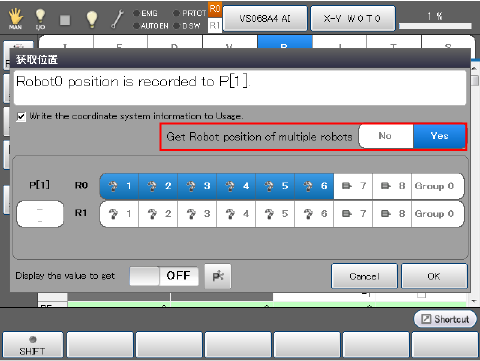
4
选择前导机器人的获取轴(机器人轴、附加轴)。

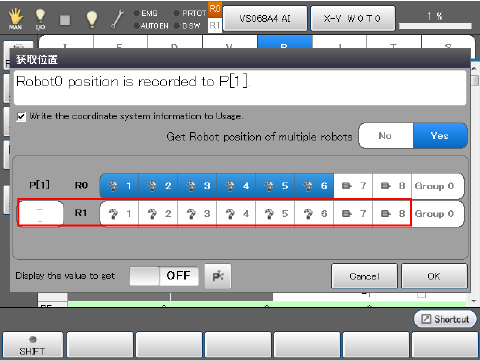
5
选择第2台机器人的获取轴(机器人轴、附加轴),或按压变量编号的空栏位置。
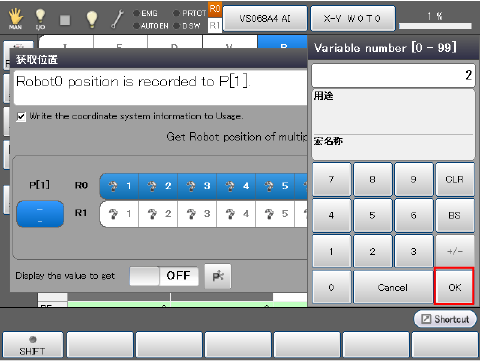
6
显示数字键后,输入变量编号并按压OK。
数字键的默认变量编为前导机器人的变量编为的下一个编号或者前一个编号。
7
在用途栏中写入坐标系信息(机器人编号、工件编号、工具编号)时,勾选“将坐标系信息写入用途中”。
按压OK。
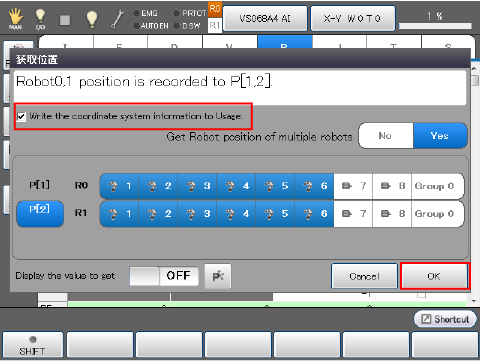
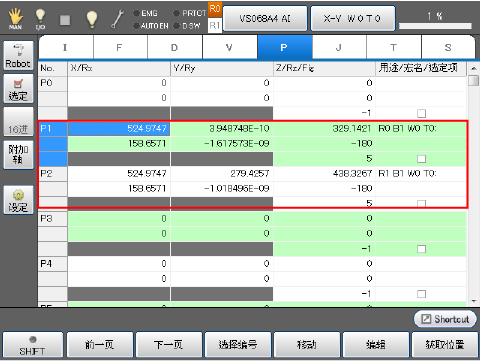
该例中,分别将前导机器人的位置写入变量P1,第2台机器人的位置写入变量P2。
- 如果在STEP7中勾选“将坐标系信息写入用途中”,在用途栏中写入坐标系信息(机器人编号、工件编号、工具编号)。已写入用途栏时,则覆盖坐标系信息。
- 控制器重新启动时,“将坐标系信息写入用途中。”的勾选被保持。(Ver.1.13.*或更高版本)
- 选择写入坐标系信息的用途栏,按压[F5 编辑]清除用途栏的内容。
选项功能
在“获取位置”画面中将“获取值显示”设定为“ON”后,显示机器人的当前位置。
在“获取值显示”为“ON”状态时,按压“P”按钮后将切换为“J”按钮,并显示附加轴的位置信息。显示“J”按钮时,如果按压“J”按钮,则将返回“P”按钮。
ID : 2008