
ID : 2005
手动进行协调动作
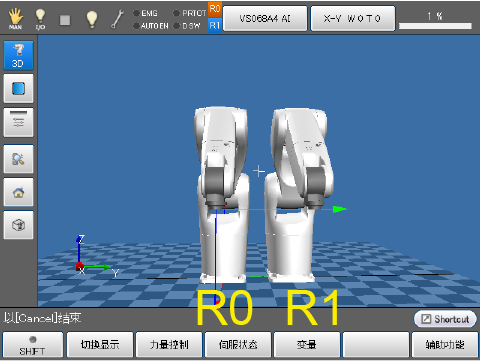
手动使2台机器人进行协调动作。
前导机器人向Y+方向移动时以及前导机器人向Rx+方向移动时的协调动作示例如下所示。
- 需要预先设定基准坐标。关于基准坐标的设定方法,请参照“基准坐标的设定”。
- 在各轴动作模式下不能使用协调动作
前导机器人向Y+方向移动时
使前导机器人向Y+方向移动。按压多功能教导器的双重安全开关的同时,按压移动方向键J2/Y的+按钮。
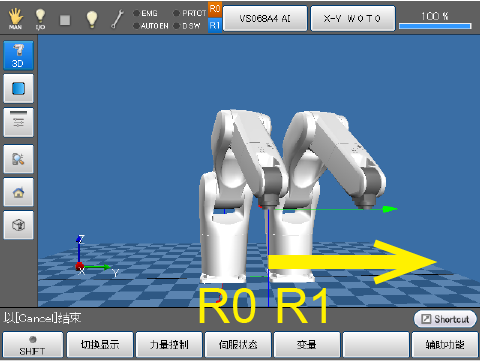
根据前导机器人的动作,跟踪机器人沿箭头方向移动。
前导机器人向Rx+方向移动时
使前导机器人向Rx+方向移动。按压多功能教导器的双重安全开关的同时,按压移动方向键J4/RX的+按钮。
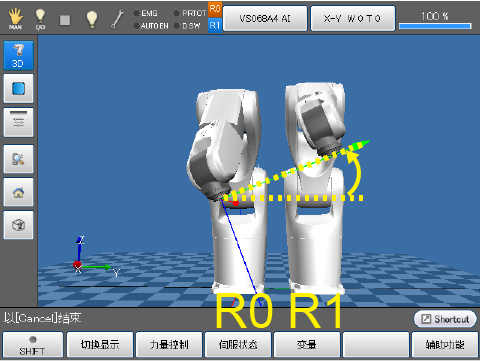
通过协调动作,跟踪机器人的旋转中心为前导机器人的工具坐标原点。
该例中,前导机器人的工具坐标选择TOOL0,因此跟踪机器人以前导机器人的法兰为中心进行旋转。
ID : 2005