
ID : 2004
前期准备
手动使2台机器人进行协调动作的前期准备包括动作模式的变更、前导和跟踪的设定。
动作模式的变更
变更动作模式。
在动作模式为“X-Y”或“TOOL”时可进行协调功能的手动操作。
1
按压“动作模式选择”按钮。
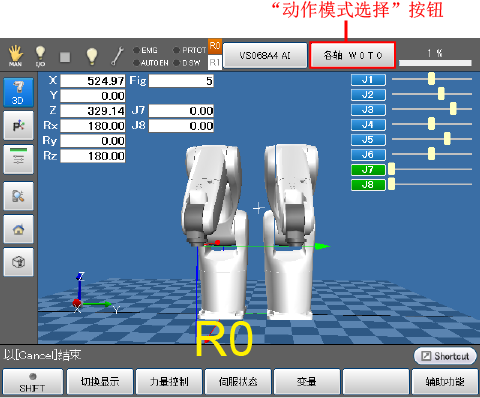
显示“动作模式选择(Robot*)”画面。
2
选择动作模式。此处选择“X-Y”模式。
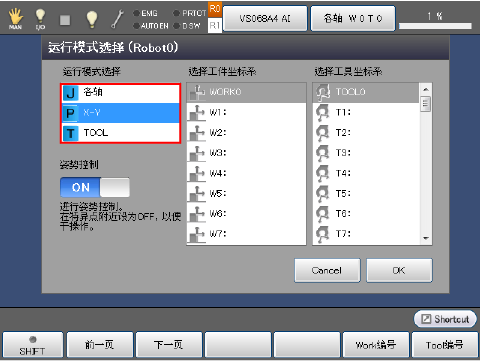
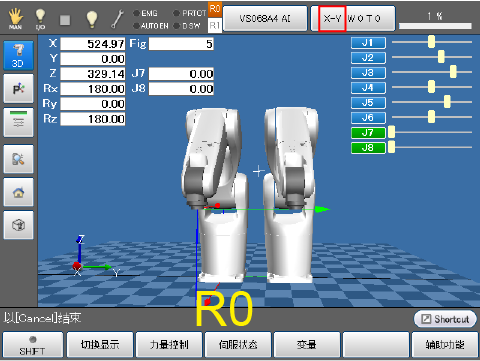
3
如果按压[OK]按钮,则动作模式发生变更。
机器人的选择
设定前导和跟踪。
此处所示为将Robot0的机械臂设定为前导、Robot1的机械臂设定为跟踪的示例。
选择前导的“机械臂”时,跟踪中也仅可选择“机械臂”。另外,选择前导的“附加轴”时,跟踪中也仅可选择“附加轴”。
1
按压“机器人选择”按钮。
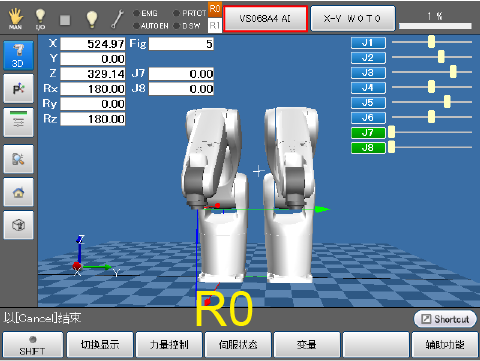
显示“机器人选择”画面。
2
触摸前导栏的R0,选择作为前导的机器人。
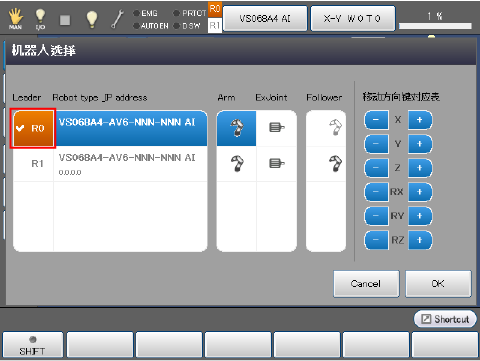
选择附加轴时,触摸R0的附加轴栏。
3
触摸跟踪栏的R1并选择跟踪。
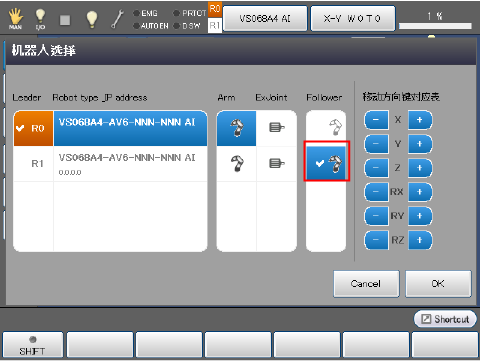
4
按压“OK”按钮。

显示设定的状态。
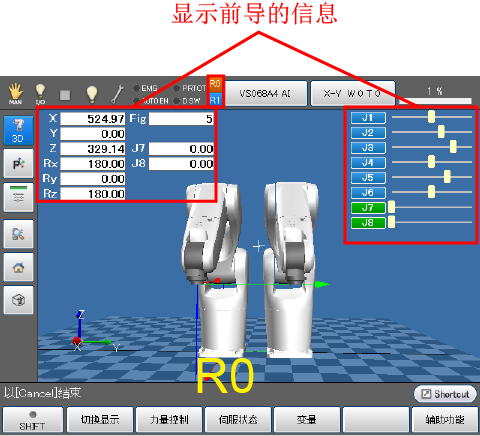
画面上部显示的“R0”、“R1”的颜色反映当前的设定状态。
・橙色:前导
・蓝色:跟踪
・白色:未选择
・橙色:前导
・蓝色:跟踪
・白色:未选择
ID : 2004