
ID : 1964
位置数据
位置数据,是指机器人的法兰中心(工具定义有效时为工具前端)的位置与表示此时机器人姿势的7要素的基准坐标系(工件坐标系有效时为工件坐标系)的数据。
表示机器人的当前位置及移动目标位置时,包含机器人的姿势在内也使用该位置数据。
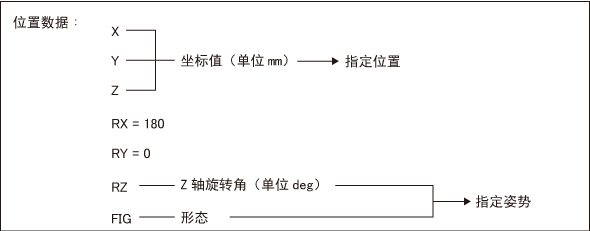
用X、Y、Z表示的坐标值是,用基准坐标系(工件坐标系有效时为工件坐标系)表示机器人的法兰中心(工具定义有效时为工具前端)的位置的值,单位是[mm]。
用RZ所示的旋转角度,就是机械界面坐标系(工具定义有效时为工具坐标系)的X轴与基准坐标系(工件坐标系有效时为工件坐标系)的X轴的夹角,单位是[deg]。围绕基准坐标(工件坐标系有效时为工件坐标系)的Z轴进行RZ旋转时的X轴要与机械界面坐标系(工具坐标系)的X轴保持一致。
用FIG表示的形态是指机器人手臂的关节所采取的形态。也可选择并指定表示形态的数值,但使用自动选择最佳值的功能可简单指定。关于自动选择功能,请参照功能指南中的“最佳Fig自动选择功能(Auto Fig)”。
ID : 1964