
ID : 1968
关于臂的形态
4轴机器人,对于工具前端的1个位置和姿势,可以采用下图所示的2种手系。如果将第4轴的形态与此组合,则对于任意的1个位置和姿势可以采取下表所示的4种形态。
| 值 | 形态 |
|---|---|
| 0 | SINGLE―RIGHTY |
| 1 | SINGLE―LEFTY |
| 16 | DOUBLE―RIGHTY |
| 17 | DOUBLE―LEFTY |
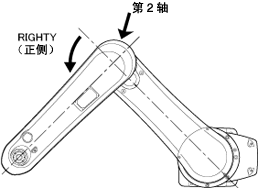
反手(LEFTY)、正手(RIGHTY)
| 右手系 | 左手系 |
|---|---|
 |
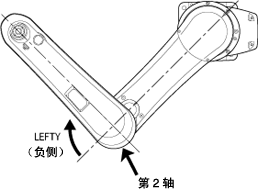 |
如图所示,从上面观察机器人(地面设置的情况下),将第2轴位于基准坐标系X轴的正方向一侧的状态叫做右手系,第2轴位于其负方向一侧的状态叫做左手系。
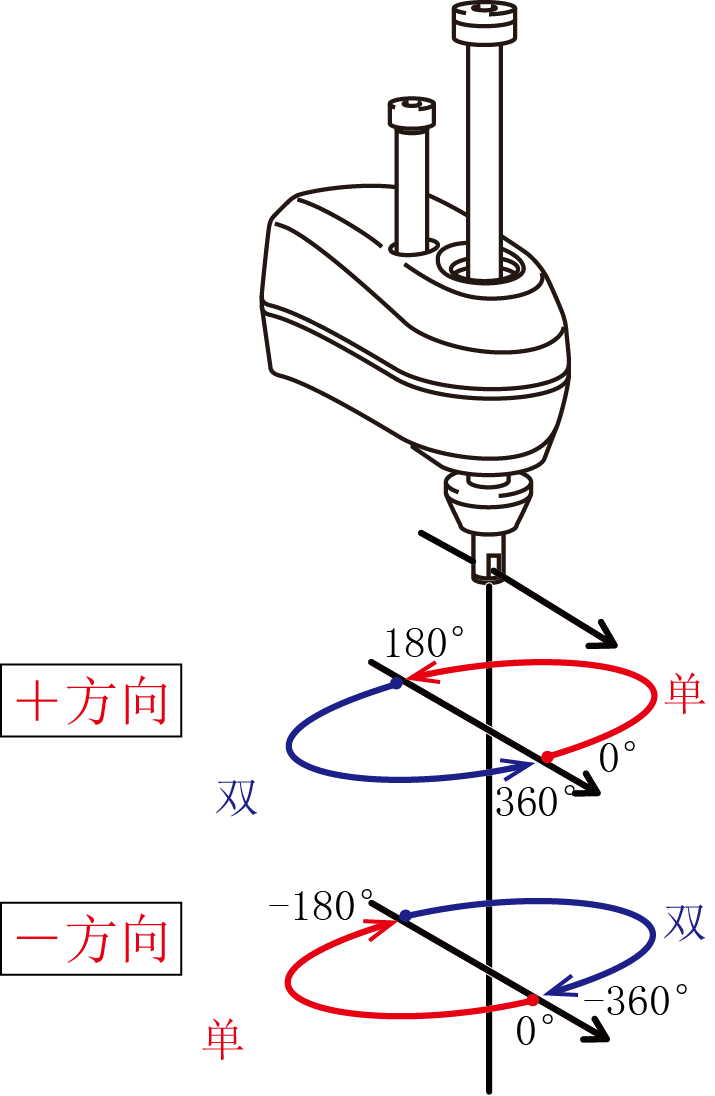
单(SINGLE)、双(DOUBLE)
第4轴的旋转角θ4为(-180°<θ4≤180°)时为单,(180°<θ4≤360°或-360°<θ4≤-180°)时为双。
ID : 1968