
ID : 1609
通过动作的效果变小时
非动作命令位于通过动作后时
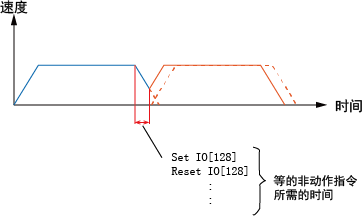
如果通过动作指令和下一个动作指令之间存在非动作指令,通过动作的执行时间缩短效果变小。非动作指令是指不执行机器人本体动作的指令。
下图表示通过动作指令和下一个动作指令间存在非动作指令的示例。如下图所示,该示例中由于在通过动作指令的减速时间中执行非动作指令,因此通过动作的执行时间缩短效果变小。
Sub Main
TakeArm Keep = 1
'通过动作指令
Move L, @P P[2]
'非动作指令
Set IO[128]
'非动作指令
Reset IO[128]
' :
' :
'通过动作指令
Move L, @P P[3]
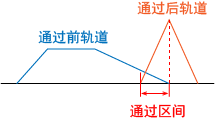
通过后的轨道较短时
通过后轨道变短,速度模式变成三角模式时,通过起始位置将延迟,在通过后的轨道的加速结束时完成通过动作。因此,如下图所示,通过前轨道的减速度较小时,通过效果明显变小。
ID : 1609