
ID : 1495
电动夹治具的状态
通过电动夹治具画面确认电动夹治具的状态。-1表示亮灯,0表示熄灭。
另外,还可使用指令获取状态。
紧急停止状态(Hand[n].EmgState / SelectHand[m,n].EmgState)
表示紧急停止输入状态。
-1:紧急停止解除状态。(紧急停止输入短路)
0:紧急停止状态。
电机(Hand[n].Motor / SelectHand[m,n].Motor)
表示电机电源状态。
-1:电机电源ON
0:电机电源OFF
动作状态(Hand[n].BusyState / SelectHand[m,n].BusyState)
表示动作状态。
-1:动作中。发出动作指令,接收其信号时。
0:可接收动作指令
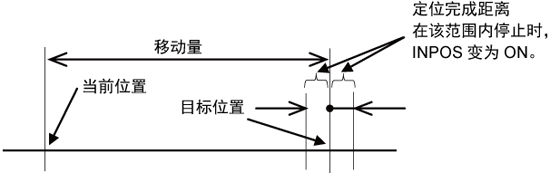
INPOS状态(Hand[n].InposState)
表示是否进入目标位置(INPOS状态)。
-1:原点复位、定位动作后、目标位置的范围内
0:目标位置的范围外或移动中
通过参数“定位结束距离”决定目标准位置的范围。
| 动作模式 | 目标位置 |
|---|---|
| 绝对位置移动 | 移动量的位置 |
| 相对位置移动 | 当前位置+移动量 |
| 加减速绝对位置移动、夹持 | 移动量+限制宽度 |
| 加减速相对位置移动、夹持 | 当前位置+移动量+限制宽度 |
| 带ZON的恒速移动夹持(闭)、恒速移动夹持(闭) | +软件限制的位置(注1) |
| 带ZON的恒速移动夹持(开)、恒速移动夹持(开) | -软件限制的位置(注1) |
注1:返回原点方向(开)时。
返回原点方向(闭)时软件限制为相反侧。
保持(Hand[n].HoldState / SelectHand[m,n].HoldState)
表示夹治具的夹持状态。
-1:以设定的夹持力夹持工件
0:未夹持
相对于目标位置(参照上述INPOS项),在±1脉冲以内时输出OFF。
每脉冲的移动距离(分辨率)
单位(μm)
| 形式 | 距离 | 形式 | 距离 | 形式 | 距离 |
|---|---|---|---|---|---|
| SS-2005-3N | 31.4 | SD-2005 | 1.6 | ST-2004 | 31.4 |
| SS-2005-5N | 18.9 | SD-2810 | 1.7 | ST-2013 | 32.1 |
SS-2010 |
17.5 |
SD-4220 |
1.9 |
ST-2820 |
16.1 |
| SS-2815 | 10.6 | FS,FT-2020 | 1.6 | ST-4230 | 23.6 |
| SS-4225 | 15.7 | FS,FT-2840 | 1.3 |
注)在工件倾斜状态下夹持,之后如果爪移动,则保持信号OFF。
之后即使正常夹持,保持信号有时也不ON。
返回原点完成(Hand[n].OrgState / SelectHand[m,n].OrgState)
表示原点复位状态。
-1:原点复位完成
0:原点复位未完成(原点操作未完成)
区(Hand[n].ZonState / SelectHand[m,n].ZonState)
表示电动夹治具是否位于设定范围内的状态。
带ZON的恒速移动夹持(闭)或(开)
-1:位于指定范围1至指定范围2之间
0:位于指定范围以外
错误(Hand[n].Error / SelectHand[m,n].Error)
表示错误状态。
0以外:错误发生状态。值表示错误编码。
0:正常状态
错误内容请参照”错误讯息一览”。
ID : 1495