
ID : 1044
清空机器人异常(输入)
功能
如果将该信号置于ON(短路)状态、把运行准备开始信号置于ON,则清空由机器人异常所造成的停止状态。
使用方法
机器人发生异常而停止时,用于清空错误。
输入条件和动作
- 发生机器人异常时,清空多功能教导器或小型教导器上的错误显示、及外部输出“错误编号”,置于可以动作状态。
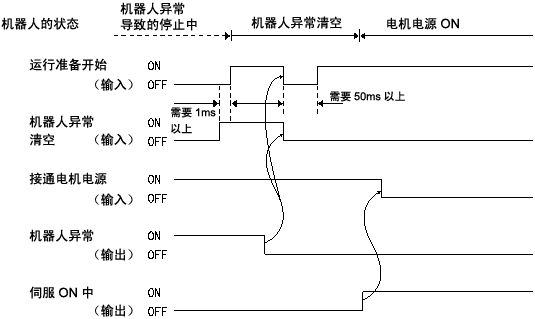
- 机器人异常清空输入信号为ON(短路)时,与运行准备开始的输入信号组合使用的其他输入信号(“接通电机电源”、“执行CAL”、“SP100”、“外部模式切换”)将被忽略。 在机器人异常清空之后,接通电机电源等时,要按照下图所示,在机器人异常信号(输出)OFF之后,将机器人异常清空输入信号置于OFF(释放)。
- 机器人异常清空信号要先于(1ms以上)运行准备开始信号输入。
状态图
 |
 |
ID : 1044