全文检索
指令检索
选择菜单
VS机器人使用说明书
VM机器人使用说明书
VP机器人使用说明书
程序员手册
RC8系列机器人控制器说明书
RC8 Mini I/O使用说明书
专用输出入信号说明书
并行I/O面板使用说明书
DeviceNet子局板使用说明书
CC-Link远程装置面板使用说明书
电动夹治具指南
插件指南
功能指南
多功能教导器操作指南
小型教导器操作指南
操作盘指南
安全注意事项
机器人基础知识
选件编号列表
WINCAPSⅢ指南
非推荐指令
HM机器人使用说明书
HS机器人使用说明书
RC7M指令对应表
PROFIBUS子局板使用说明书
错误编码
XR机器人使用说明书
EtherNet/IP Adapter板使用说明书
启动手册
附加轴使用说明书
传送跟踪使用说明书
Hand I/O使用说明书
VS-6556/6577机器人使用说明书
MC8(动作控制器)使用说明书
控制器保护箱使用说明书
PROFINET IO装置面板使用说明书
DeviceNet主局板使用说明书
工序间运输机器人使用说明书
I/O转换箱
参数表
EtherCAT子局板使用说明书
外部视觉指南
内置视觉指南
协调功能指南
紧急停止开关箱使用说明书
术语集
查阅本书的方法与操作方法
Q&A
HSR机器人使用说明书
RC8A安全动作规格使用说明书
RC8A Mini I/O使用说明书
EtherCAT Slave Motion使用说明书
HSA1机器人使用说明书
外部附加轴(EtherCAT)使用说明书
圆形跟踪使用说明书
Command-Slave参考指南_SIEMENS-S7
Command-Slave使用指南_SIEMENS-S7
双臂控制功能使用说明书
Command-Slave使用指南_Rockwell
Command-Slave参考指南_Rockwell
Command-Slave参考指南_CODESYS
Command-Slave使用指南_CODESYS
Command-Slave参考指南_ProConOS
Command-Slave使用指南_ProConOS
食品用机器人夹套套件使用说明书
原点复位向导功能指南
ID跳过
AND
OR
文字大小
小
中
大
HOME
控制器、I/O连接
专用输出入信号说明书
[RC3互换模式] 专用输入信号的种类和功能
瞬时停止(所有任务)(输入)
<< 向前
下一页 >>
安全注意事项
机器人概要、安装、维护
启动手册
控制器、I/O连接
操作指南
编程
WINCAPSIII指南
选件
错误编码
参数列表
其它
ID : 1043
瞬时停止(所有任务)(输入)
功能
从外部进行瞬时停止时,输入到正在执行的程序上。所有的任务瞬时停止。
输入条件和动作
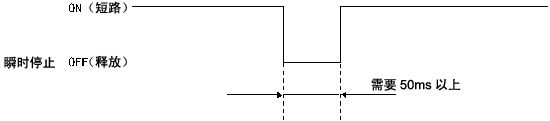
如果该信号进行ON(短路)→OFF(释放)操作,机器人在当前正在执行的步骤的途中瞬时停止,将机器人运行过程中的输出置于OFF。但是,维持自动模式、外部模式,通过输入程序开始信号继续执行程序。
由多功能教导器或小型教导器进行内部运行时,该信号仅在ON(短路)→OFF(释放)时有效。
瞬时停止后的再次启动方法请参照“程序开始(输入)”。
最低脉冲宽度要设为50ms以上。
状态图
ID : 1043
<< 向前
下一页 >>
返回顶部
 HOME
HOME