
ID : 1039
程序开始(输入)
功能
从外部机器让程序No.选择信号上所指定的程序开始。
输入条件和动作
为外部模式时,通过使该输入由OFF(释放)→ON(短路),执行如下动作。(务必需要从OFF到ON的状态变换。)
机器人在尚未执行程序时
机器人在尚未执行程序时,或1个循环结束处于停止状态时,如果输入程序开始信号(从OFF到ON),则就会读取程序No.选择信号,将该程序执行1个循环之后停止。
程序No.选择信号必须先于程序开始(1ms以上)输入,在机器人开始之前维持状态。如果不满足该条件,则显示错误,将电机电源置于OFF。(注:此时,标准规格时向内部自动模式切换,在通用规格时按照单一位置控制功能的设定,保持外部自动模式状态。)
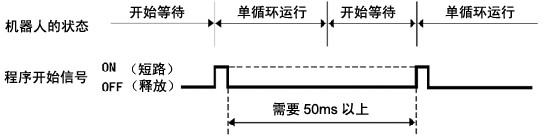 |
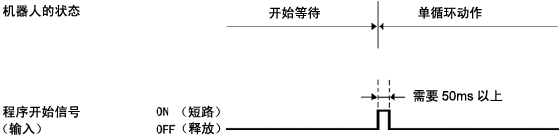
输入OFF(释放)→ON(短路)前,程序开始信号需要程序开始准备时间(50ms以上)。
在程序开始的准备时间内,程序开始信号必须保持OFF(释放)状态。在程序开始的准备时间内,程序开始的信号处于ON(短路)时下一个循环不开始。
为了开始新的循环,则在每1个循环上需要外部开始信号的OFF→ON。
程序执行途中的步骤停止状态
在程序执行途中的步骤停止状态下,如果将程序开始信号从OFF置于ON,则从停止的步骤的下一个步开始执行,在循环末端停止。
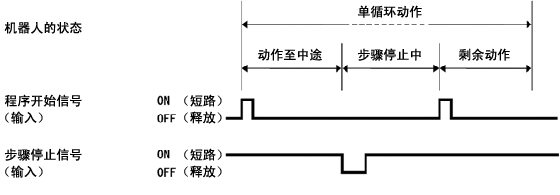 |
从步骤停止状态中断剩余的动作、从程序的开始位置开始时,程序复位信号、程序No.选择信号、程序开始信号3个同时输入,可以从开始位置开始任意的程序。详细内容请参照“程序复位(输入)”。
程序执行途中的瞬时停止状态
在程序执行途中的瞬时停止状态下,如果将程序开始信号从OFF置于ON,则从停止的步骤的下一步开始执行,在循环末端停止。
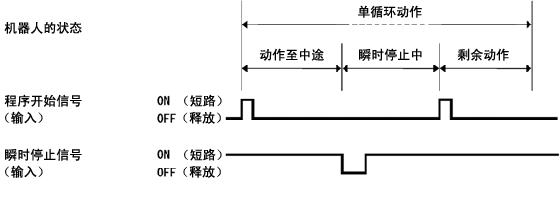 |
注意:从瞬时停止状态中断剩余的动作、从程序的开始位置开始时,程序复位信号、程序No.选择信号、程序开始信号3个同时输入,可以从开始位置开始任意的程序。详细内容请参照“程序复位(输入)”。
程序开始信号的(启动)ON、(结束)OFF的定时示例
程序开始信号启动(ON)的时机示例
机器人专用输出(外部模式输出和1个循环结束输出)启动程序开始信号的方法列于下图。
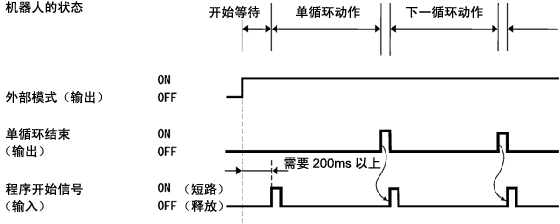 |
第1个循环的程序开始信号在外部模式ON和外围装置的条件完备时启动。第2个循环以后,1个循环结束输出后程序开始信号启动。
结束程序开始信号(OFF)的时机示例
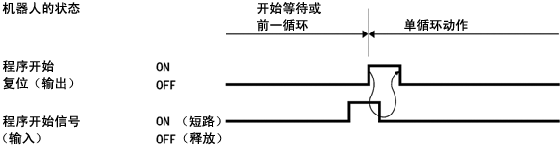
用机器人专用输出(程序开始的复位输出)关闭程序开始信号的方法
用机器人专用输出(程序开始的复位输出)关闭程序开始信号的方法列于下图。
如果机器人的程序开始,则输出程序开始的复位信号。在外部接受该输出信号,关闭程序开始信号(OFF)。
 |
用简易方式(由定时器控制的单个发射方式)关闭程序开始信号的方法
用简易方式(由定时器控制的单个发射方式)关闭程序开始信号的方法列于下图。
 |
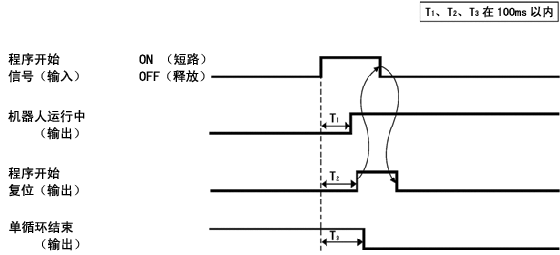
- 单个发射是简便方式,但从前一循环的途中启动程序开始信号的使用方法时不易设定结束的定时器。
仅限于机器人在每一循环停止之后,在采用启动程序开始信号的方法时使用。 - 输入程序开始信号之后,输出信号按照机器人运行、程序开始的复位、1个循环结束的顺序变化。 (下图的T1→T2→T3)
此时的输出信号变化在程序开始信号启动(ON)之后100ms以内发生。
 |
ID : 1039