
ID : 1006
处理方法概要
为了运行I/O指令,需要进行下图所示的处理。
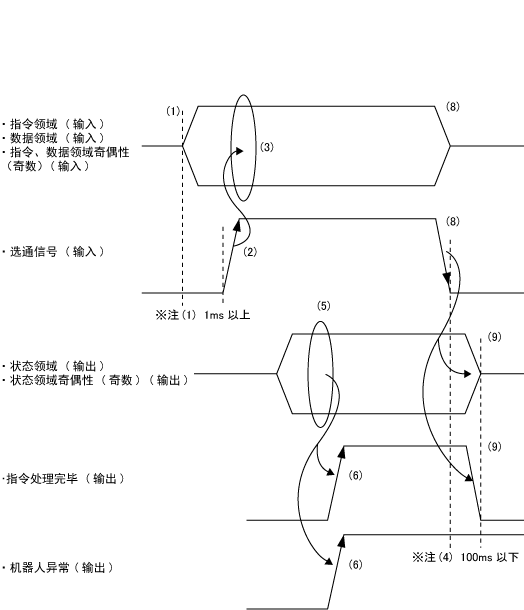 |
I/O指令处理方法概要(标准模式)
- 对于机器人控制器的指令执行输出入信号,从外部设定指令领域、数据领域(仅在需要时)、指令、数据领域奇偶性(奇数)。
需在启动选通信号超过1ms之前确定设定的数据。 - 设定结束之后,将选通信号OFF→ON。
在等待专用输出“机器人初始化完成”输出之后,再用选通信号进行指令输入。但是,在发生错误且执行机器人异常清空时,机器人初始化完成信号不输出,请按此状态执行。
- 控制器用选通信号输入读取指令领域、数据领域、指令、数据领域奇偶性(奇数)。
- 控制器根据读入的指令进行处理。
- 指令是状态输出信号时,控制器会调整状态领域、奇偶状态校验。
- 完成指令处理且设定状态领域之后,控制器将指令处理完毕信号启动至OFF→ON。 在处理过程中发生错误时,与指令处理完毕信号同时输出机器人异常。
- PLC等待指令处理完毕信号输入,如果需要,则获取状态领域的状态。此时,也要确认机器人是否发生异常。
- PLC状态读入结束之后,将指令、数据领域以及选通信号置于OFF状态。
选通信号ON→OFF之后,状态领域和指令处理完毕信号变为OFF所需的最长时间为100ms。 - 通过选通信号ON→OFF的启动,控制器将状态领域和指令处理完毕输出置于OFF状态。 伴随指令处理错误输出的机器人异常,在机器人异常清空指令执行之前保持ON状态。
指令处理完毕信号OFF→ON之前,选通信号为OFF时,指令处理完毕信号和状态领域一旦输出后,将在100ms内变为OFF状态。
ID : 1006