
ID : 975
CALSET
什么是CALSET?
将控制器识别的位置信息和机器人本体的实际位置关系进行校正称作CALSET。CALSET中,各轴存在预先规定的可固定位置,创建该位置和编码器值相对应的数据(CALSET值)。此时,固定轴的位置称作CALSET位置,记录CALSET位置的度数的数据为RANG值。
每台机器人的CALSET数据都不相同。
更换电机或编码器的备份电池电量不足、编码器内的位置数据丢失时,需要进行CALSET作业。
CALSET作业有“CALSET”和“CALSET数据复原”。
电机更换后请执行“CALSET”,其他的情形请执行“CALSET数据复原”。
由用户管理机器人的CALSET数据。参考“关于项目的备份”,定期对CALSET数据进行备份。
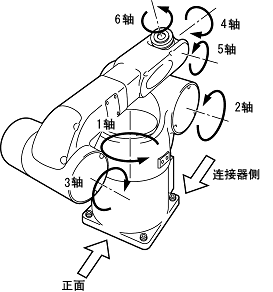
出厂时的CALSET位置
| 轴 |
CALSET位置 | |
|---|---|---|
| 位 置 |
1轴 | 正方向旋转端(从上方观察时为逆时针方向端) |
| 2轴 | 负方向旋转端 | |
| 3轴 | 正方向旋转端 | |
| 4轴 | [无机械限动器]: 根据CALSET治具设计的正方向旋转端(从机械臂前端侧观察时为逆时针方向端) | |
| 5轴 | 正方向旋转端(5轴机械臂上侧方向端) | |
| 6轴 | 根据CALSET治具设计的正方向旋转端 | |
VM-6083、VM-60B1型
|
||
CALSET的步骤
1
解除要执行CALSET的轴的制动器,并置于CALSET位置。
2
通过多功能教导器进行CALSET。
操作方法请参照多功能教导器操作指南的“CALSET操作菜单的显示”。
ID : 975