
ID : 426
CPMode
功能
变更CP插补模式设定。
解说
变更CP插补模式设定。
关于CP插补模式
CP插补模式是CP动作时调整动作时间的方法种类。
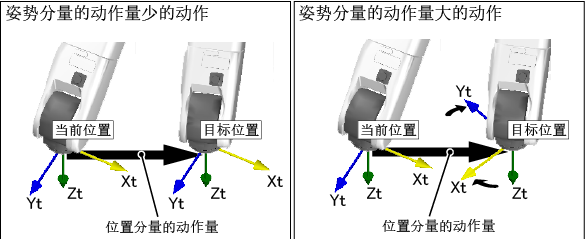
如果将机器人动作的分量大致分为2类,可分为姿势分量和位置分量。
机器人动作时,机器人控制器用姿势分量和位置分量的各个分量算出从当前位置到目标位置要花的动作时间。根据这些动作时间调整实际动作时间的方法有几种。根据这些调整方法,CP插补模式可以如下分类。
- 设定值 : 0 “取决于旋转动作”
- 姿势分量和位置分量的各动作时间中,任何较长的一方为实际的动作时间。
- 设定值 : 1 “速度恒定” (默认)
-
位置分量的动作时间为实际的动作时间。但是,若姿势分量的动作量大,即使将姿势分量的动作速度提高到上限,也有可能赶不上位置分量的动作时间。此时,将姿势分量的动作速度提高到上限后的、姿势分量的动作时间变为实际的动作时间。
姿势分量的动作速度的上限与速度设定(外部速度 * 内部速度)成正比。因此,相同动作也有可能变成如下情况。
- 速度设定低时,姿势分量的动作时间赶得上位置分量的动作时间。
- 速度设定高时,姿势分量的动作时间赶不上位置分量的动作时间。
结果,速度设定低时,实际的动作时间可能变短。
- 设定值 : 2 “速度恒定(兼容)”
- 设定值 : 与1的时候基本相同,但姿势分量的动作时间赶不上位置分量的动作时间时,实际的动作时间变成比设定值 : 1时更短的时间或者与其相同。
变更方法
CP插补模式的变更方法有使用CPMode指令的方法和变更参数的方法2种。
用CPMode指令变更后,如果重启机器人控制器的电源,CP插补模式就恢复原来的设定。
设定CP插补模式的参数是用户参数的“切换TCP速度设定”。变更了参数后,即使重启机器人控制器的电源,CP插补模式也不会恢复原来的设定。
相关项目
注意事项
- 必须获取机器人轴的控制权。
- 变更CP插补模式后,机器人的动作速度可能改变。
应用示例
'!TITLE "电装机器人程序"
Sub Sample_CpMode
TakeArm Keep = 1
CpMode 0
End SubID : 426