
ID : 7958
瞬时停止(所有任务)(输入)
功能
从外部进行瞬时停止时,输入到正在执行的程序上。执行后所有的任务瞬时停止。
输入条件和动作
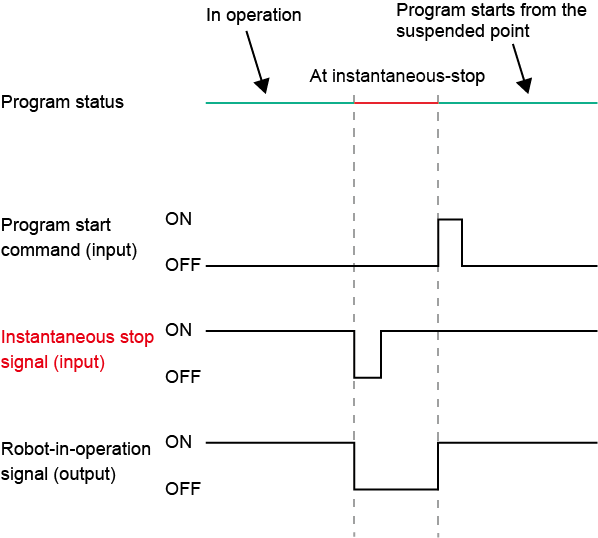
如果该信号进行ON→OFF操作,机器人在当前正在执行的步骤的途中瞬时停止,将“机器人运行过程中(输出)”置于OFF。在I/O指令 “程序操作 (启动)” 的输入中重新启动程。
关于瞬时停止之后的重新启动方法,请参照“程序操作(0001)” 。
最低脉冲宽度要设为50ms以上。
在停止信号OFF的状态下,不能根据来自外部的I/O指令“程序操作(启动)”执行启动。
可以从远程TP/虚拟TP启动程序。
状态图
下图为瞬时停止后使用I/O指令重新启动程序时的状态图。
ID : 7958