
ID : 7207
路径点设定功能
路径点设定功能是指在一个路径数据中可注册并保存多个路径点位置数据的功能。在自由曲线插补等中指定该路径数据,有序顺畅地通过位置数据执行动作。
准备20个路径,每个路径上最多可注册5,000个路径点。
路径数据内的路径点数据以位置型数据保存。
路径的存储器
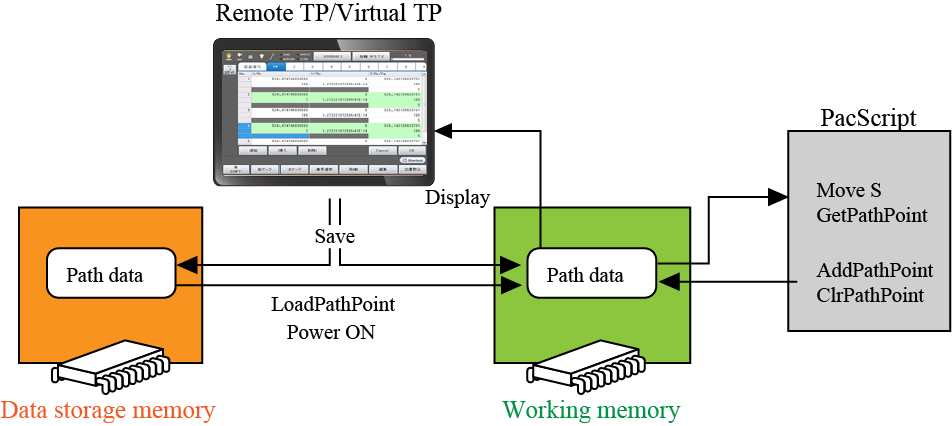
COBOTTA内配备有电源OFF时保持数据的保存用存储器和不保持数据的操作用存储器。电源接通时,COBOTTA读取保存用存储器和操作用存储器中的全部路径数据。
自由曲线插补动作虽然通过指令“Move S”实施,但此处使用的路径数据为作业用存储器内的数据。
在PacScript上编辑动态的路径点时,使用下述指令。但是,可通过PacScript指令操作的路径数据仅限操作用存储器内的数据。无法编辑保存用存储器内的路径数据。
| 指令名称 | 功能 |
|---|---|
| LoadPathPoint | 读取路径数据。 |
| ClrPathPoint | 清空指定路径的所有路径点。 |
| AddPathPoint | 在路径数据中追加路径点。 |
路径数据的注册方法
通过远程TP/虚拟TP将路径数据注册至保存用存储器中。注册画面中各按钮的说明请参照“路径点设定画面”。
不设定机器人形态时的注意事项
路径点设定功能指利用位置、姿势信息及“机器人形态的信息”构建机器人动作路径的功能,在路径点的FIG中设定-1、-2、-3时,即未明确设定机器人形态时,进行以下操作。
通过指令、编辑画面指定
通过AddPathPoint指令或远程TP/虚拟TP的路径点编辑画面编辑路径点时,如果在路径点的FIG中设定-1、-2、-3,则变为以下内容。
| Fig=-1 | 替换为路径点设定时机器人的当前Fig |
| Fig=-2、Fig=-3 | 替换为使用路径点设定时机器人的当前各轴角度自动计算的Fig |
在WINCAPSIII中的指定
通过WINCAPSIII的编辑画面在路径点的FIG中设定-1、-2、-3,且向控制器发送路径点时,变为以下内容。
| Fig=-1 | 替换为路径点接收时机器人的当前Fig |
| Fig=-2、Fig=-3 | 替换为使用路径点接收时机器人的当前各轴角度自动计算的Fig |
如果数据接收时机器人姿势与程序执行时机器人的姿势不同,则可能发生意外动作,请务必注意。
有WINCAPSIII上的路径点编辑画面中,Fig的值直接显示-1、 -2、 -3。
ID : 7207