全文检索
指令检索
选择菜单
术语集
查阅本书的方法与操作方法
机器人基础知识
功能指南
程序员手册
插件指南
参数列表
TP应用操作指南
WINCAPSIII指南
错误编码
维护
概要
安全注意事项
规格
装配、配线方法、安装方法
Cobotta World操作指南
开箱步骤和包装品
安装、连接步骤
ID跳过
AND
OR
文字大小
小
中
大
HOME
机器人动作创建
利用TP应用/WINCAPSIII创建机器人动作
功能指南
I/O通信功能
专用输入输出信号
[Mini I/O专用配置]专用输出信号的种类和功能
机器人异常(输出)
<< 向前
下一页 >>
安全注意事项
产品信息
设置
机器人动作创建
维护
附录
ID : 6923
机器人异常(输出)
功能
伺服异常、程序异常等,机器人发生异常时输出。
端子编号
Mini I/O的No.47
使用方法
用于外部操作盘等的机器人异常的指示灯显示。
该信号ON时,请用PLC等进行异常处理。
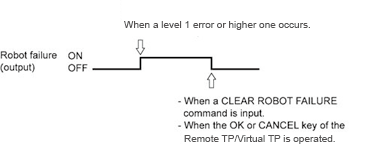
ON条件
发生错误等级1以上的错误时ON。
OFF条件
从外部输入“机器人异常清空指令”,异常解除后OFF。
用远程TP/虚拟TP通过“OK”或“Cancel”键解除异常时OFF。
状态图
ID : 6923
<< 向前
下一页 >>
返回顶部