
ID : 6845
手动操作
在普通模式下可通过远程TP/虚拟TP,进行键操作来移动机械臂。
在直接模式下,可通过手来推动机械臂使之移动。
普通模式的手动操作中包括“各轴模式”、“X-Y模式”、“TOOL模式”3种模式。方向键的作用以及按键时机械臂的移动方式根据模式不同而不同。
每个模式中画面所显示的位置信息也不相同。
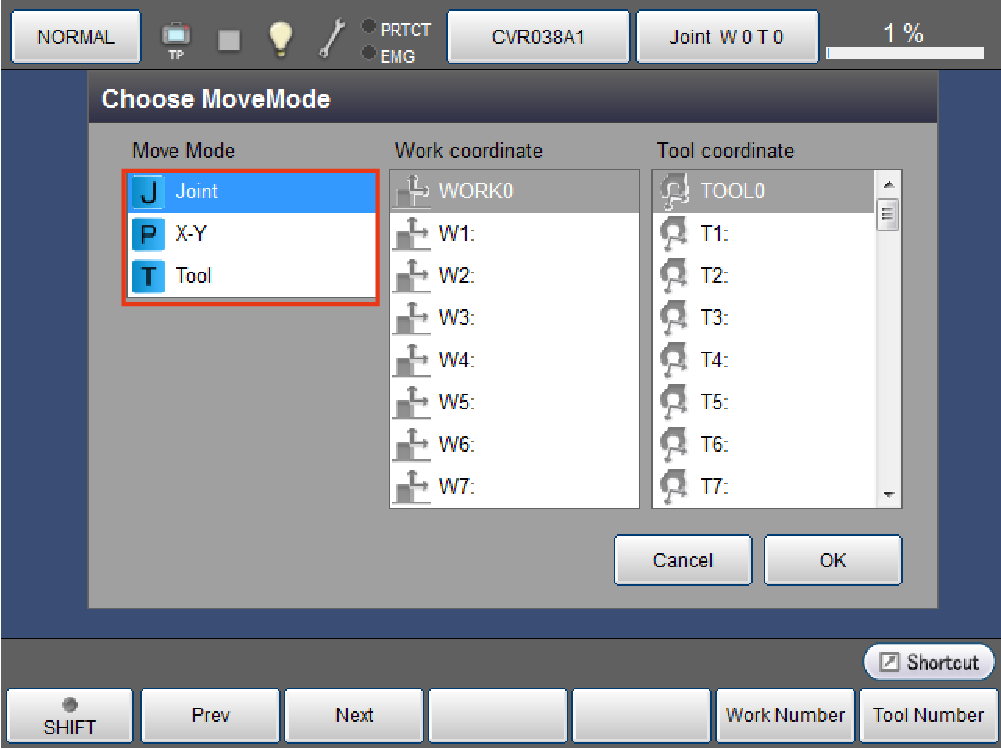
直接模式下按下[动作模式选择]的选项按钮后,画面右上方的[动作模式]按钮显示会变化。但是,不论显示何种动作模式,用户均可以相同方式移动机器人。
关于3中模式的切换步骤,请参照TP应用程序操作指南的“手动操作时的模式变更”。
ID : 6845