
ID : 4052
使用远程TP/虚拟TP的虚拟状态
可不运行实际的机器人,使用远程TP/虚拟TP来虚拟已创建机器人程序的动作。
1
确认[MOTOR]的LED熄灭并按压[LOCK]后将变为机器锁定状态。在机器锁定状态下
[LOCK]的LED亮灯。
2
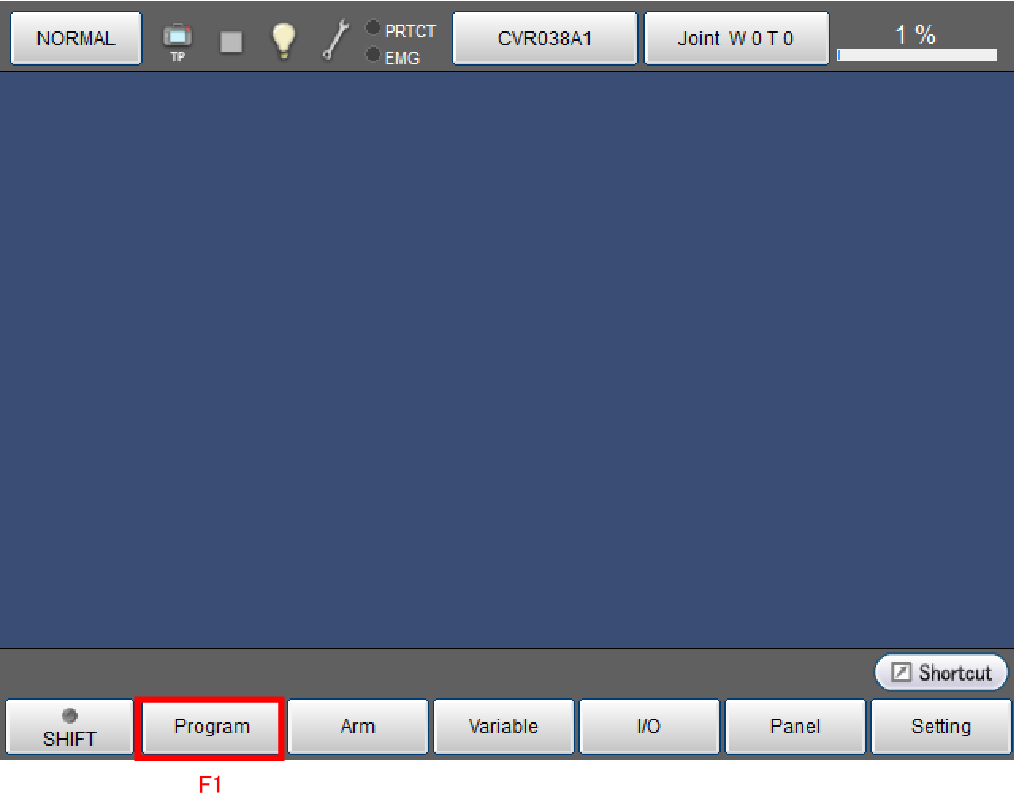
在基本画面上按压[F1 程序]。
3
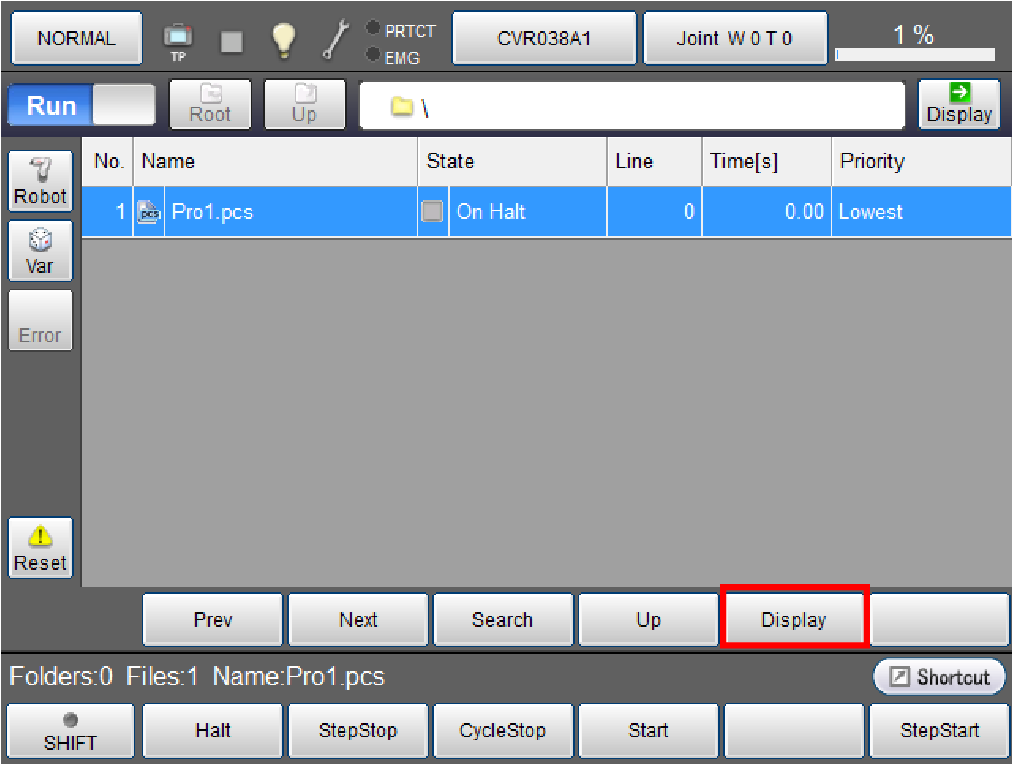
在[程序一览视窗]中选择程序并按压[显示]。
4
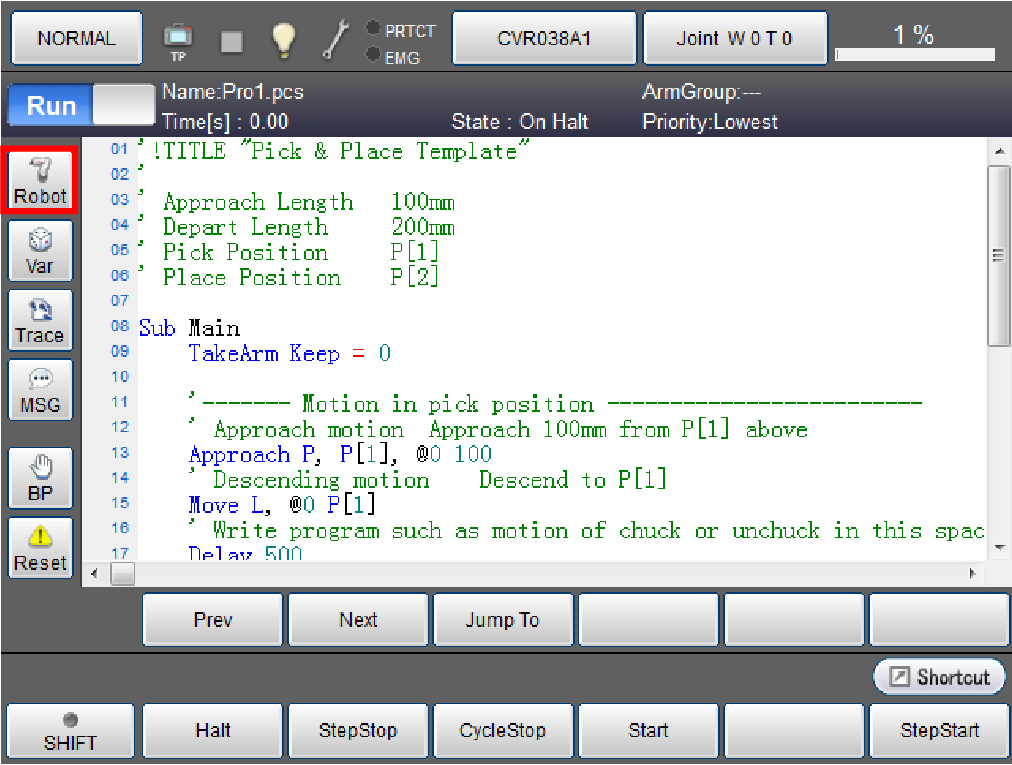
显示程序内容。
单击画面左侧的[Robot]按钮。
5
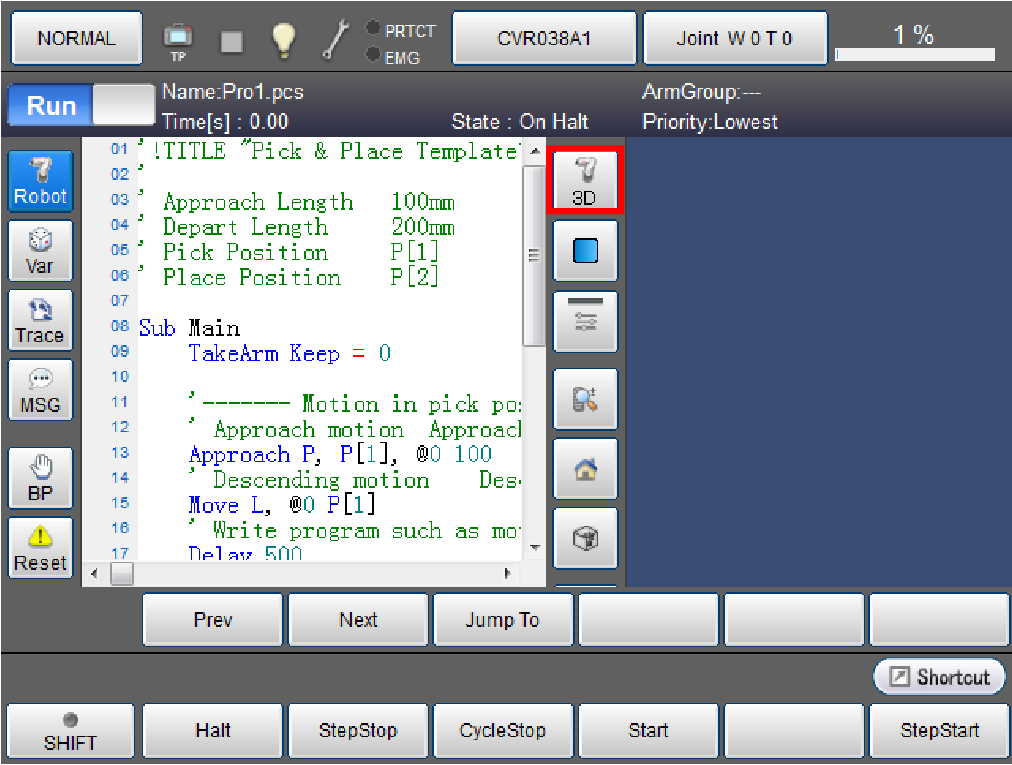
显示机器人。
不显示机器人时,请单击[3D按钮]。
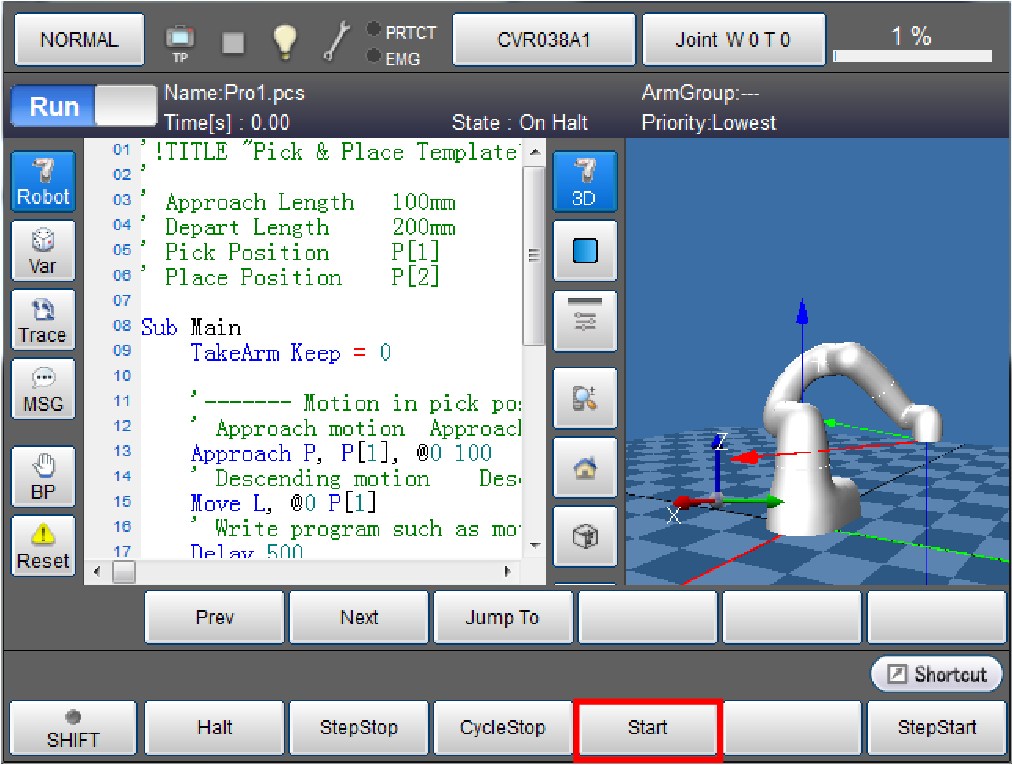
6
单击[启动]。
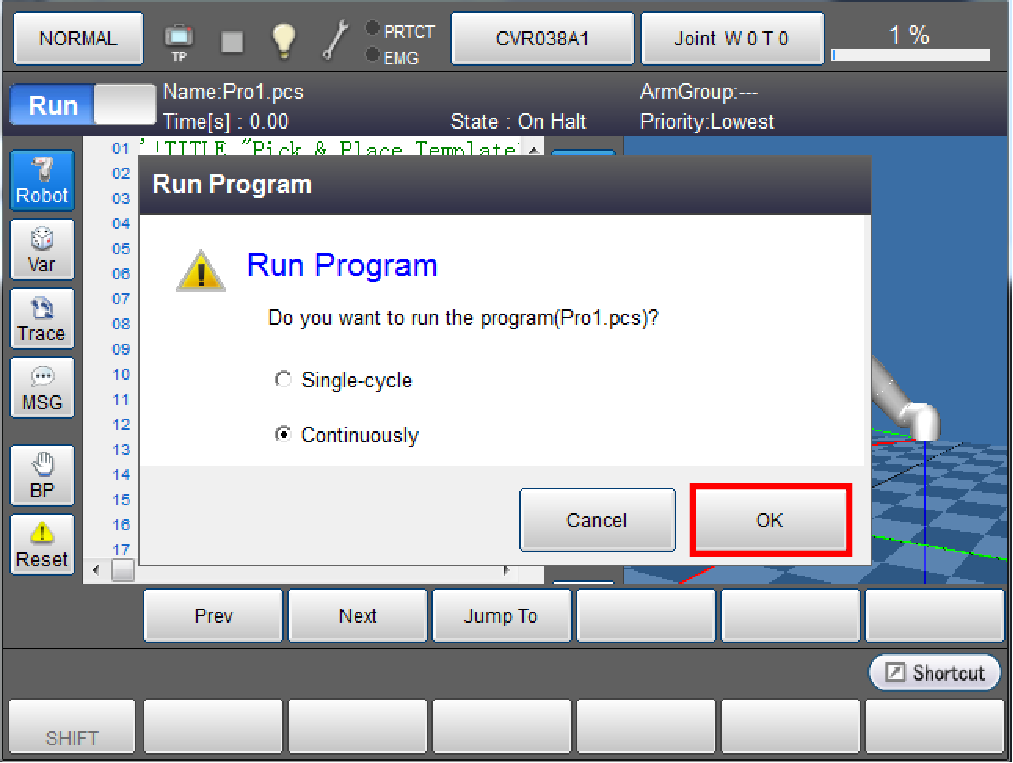
7
显示讯息后,进行选择并按压[OK]。
该示例中选择连续启动。
8
画面右侧的机器人沿左侧的程序进行动作。
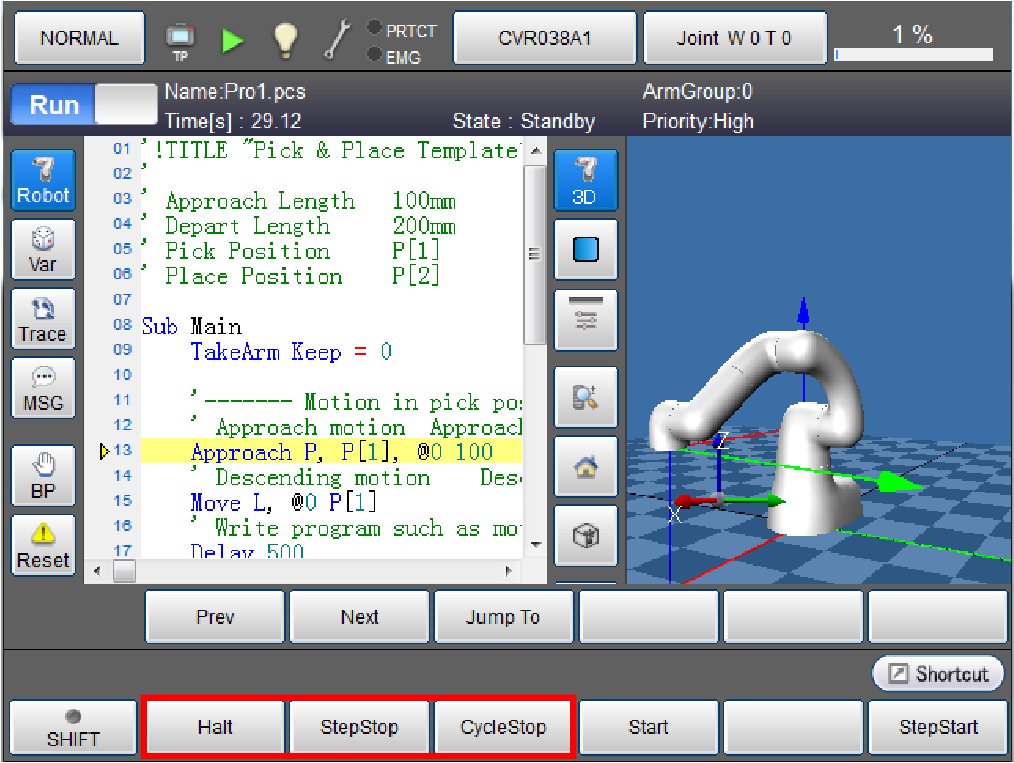
停止机器人的动作时,按压[瞬时停止][步骤停止][循环停止]中的任意一个。
- 瞬时停止 : 如果执行瞬时停止,则将立即停止。
- 步骤停止 : 如果执行步骤停止,则完成按压按钮时执行的步骤后停止。
- 循环停止 : 如果执行循环停止,则通过程序的End Sub命令停止。用于连续启动运行机器人时。
ID : 4052