
ID : 7957
ステップ停止(全タスク) (入力)
機能
実行中のプログラムに、外部からステップ停止をかけるときに入力します。実行すると全てのプログラムがステップ停止します。
入力条件と動作
この信号をON→OFFすると、ロボットは現在実行中のステップを終了した時点で、全プログラムを停止し、"ロボット運転中 (出力)" をOFFします。I/Oコマンド "プログラム操作 (起動)" の入力でプログラムの続きを再開します。
ステップ停止後の再起動方法は、"プログラム操作(0001)" を参照してください。
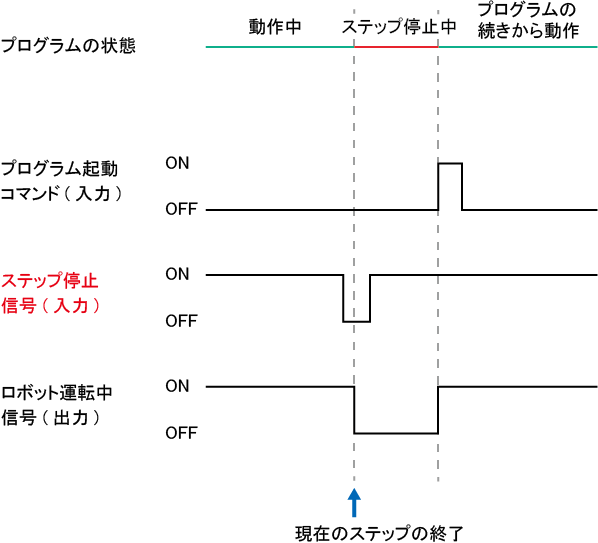
状態図
下図は、ステップ停止後にI/Oコマンドでプログラムを再開した場合の状態図です。
ID : 7957