
ID : 4052
リモートTP/バーチャルTPによるシミュレーション
作成したロボットプログラムの動作を、実際のロボットを動かさずにリモートTP/バーチャルTPを使ってシミュレーションすることができます。
1
[MOTOR]のLEDが消灯していることを確認して[LOCK]を押すと、マシンロック状態になります。マシンロック状態では
[LOCK]のLEDが点灯しています。
2
基本画面で[F1 プログラム]を押します。

3
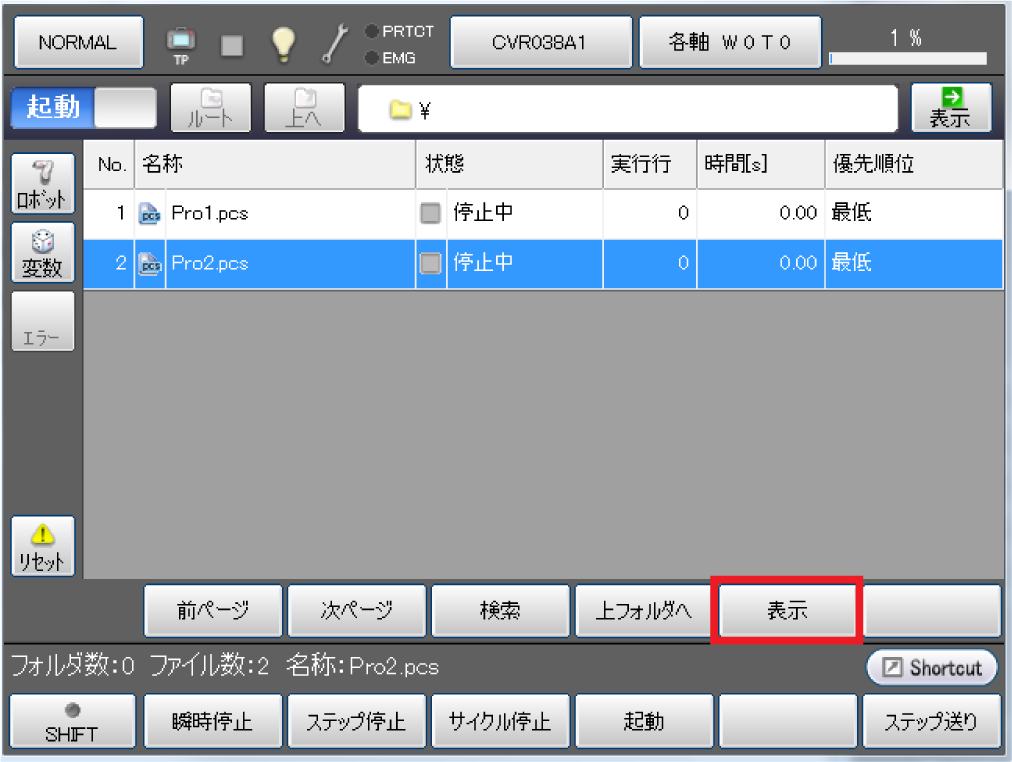
[プログラム一覧ウインドウ]でプログラムを選択し、[表示]を押します。
4
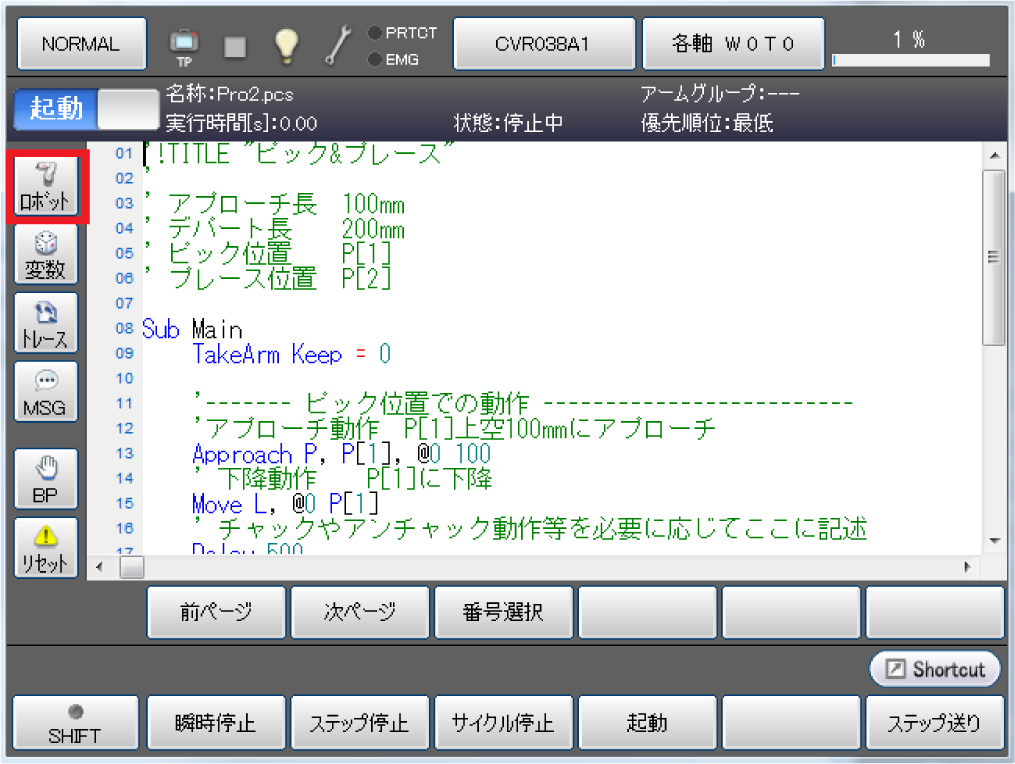
プログラムの内容が表示されます。
画面左にある[ロボット]ボタンをクリックします。
5
ロボットが表示されます。
ロボットが表示されない場合は、[3Dボタン]をクリックしてください。

6
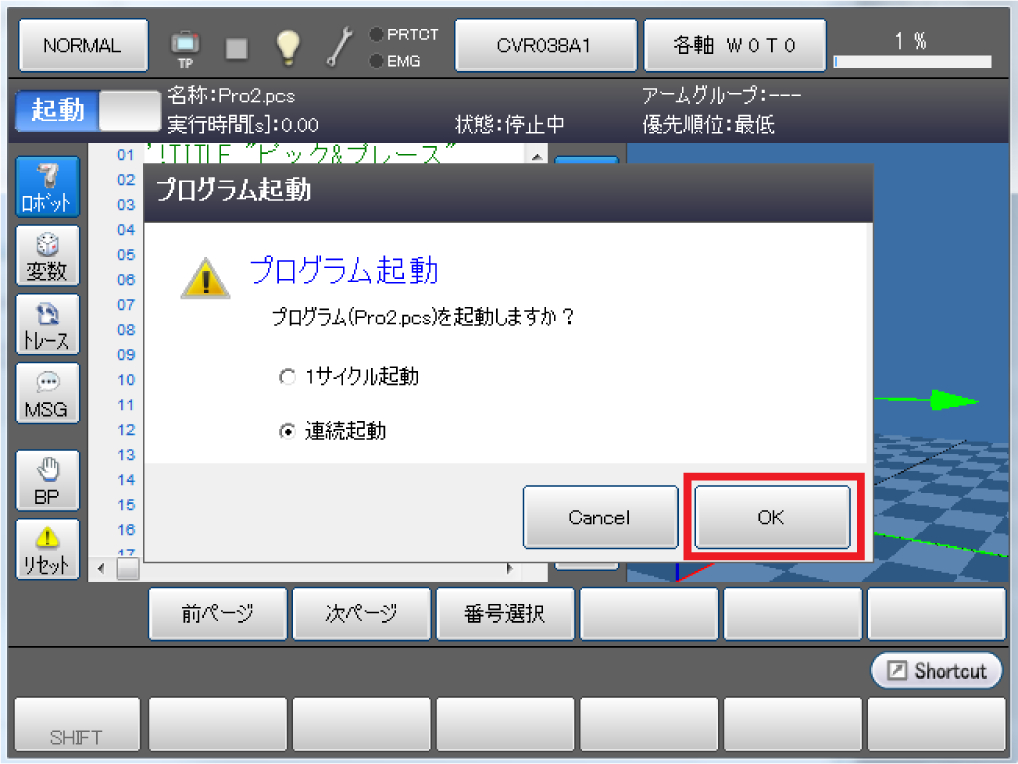
[起動]をクリックします。

7
メッセージが表示されるので、選択して[OK]を押します。
この例では連続起動を選択します。
8
左側のプログラムに沿って、画面右側のロボットが動作します。

ロボットの動作を停止する場合は[瞬時停止] [ステップ停止] [サイクル停止] のいずれかを押します。
- 瞬時停止 : 瞬時停止を実行すると、直ちに停止します。
- ステップ停止 : ステップ停止を実行すると、ボタンが押された時に実行していたステップが完了すると停止します。
- サイクル停止 : サイクル停止を実行すると、プログラムのEnd Sub命令で停止します。ロボットを連続起動で動かした場合に使用します。
ID : 4052