
ID : 11094
RC8系列机器人控制器的设定
RC8系列控制器的设定
以下规格的RC8系列控制器不可连接到MC9系列。
- 安全动作规格
- 双机械臂规格
1
将以下选件和许可证追加到连接MC9系列的RC8系列机器人控制器。
- EtherCAT子局板
- EtherCAT Slave Motion许可证
关于增设板的安装方法、功能,请分别查阅RC8系列用户手册中的以下使用说明书。
- EtherCAT子局板使用说明书(ID : 5783)
- EtherCAT Slave Motion使用说明书(ID : 2956)
2
对连接到RC8系列控制器的机器人及附加轴进行设定。
设定完成后,进行手动动作等,确认是否可以进行预期的动作。
关于RC8系列控制器的设定,请参考RC8系列用户手册。
例
- 启动手册(ID : 5193)
- 附加轴使用说明书(ID : 4868)
- 外部附加轴(EtherCAT)使用说明书(ID : 2946)
将MC8控制器连接到MC9系列时,不可在MC8控制器侧进行运动学设定。
请在MC9系列上进行MC9运动学设定。
3
RC8系列机器人控制器的设定完成后,请设定用于和MC9系列连接的参数。
通过多功能教导器设定时
1
打开SlaveMotion设定画面
要进行该操作时,请将用户等级指定为“维护”。
用户等级的指定方法请参照RC8系列用户手册ID : 1772。
操作步骤 : [基本画面] - [F6 : 设定] - [F5 : 通信与启动权] - [F5 : SlaveMotion设定]
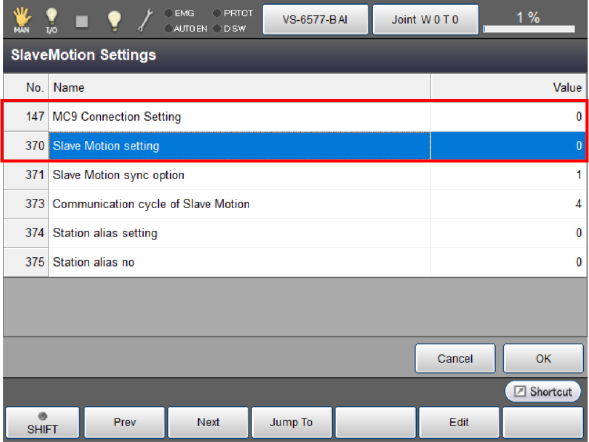
2
将[147:MC9连接设定]、[370:SlaveMotion设定]设为[1:有效],按下[OK]。
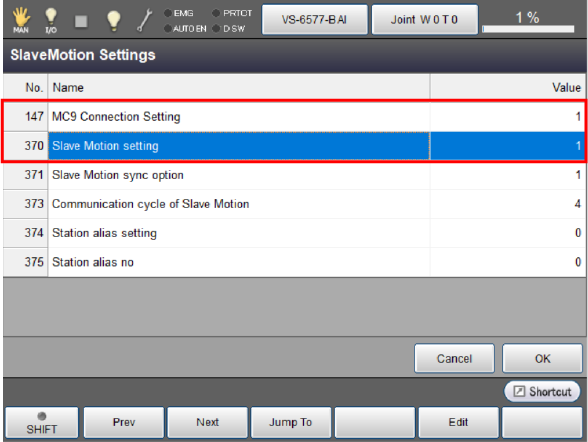
设定结束后,请重启。
通过WINCAPSIII设定时
1
打开要进行设定的RC8机器人的项目。
打开项目后,打开参数编辑画面,再打开VRC参数画面。
操作步骤 : [项目标签] - [参数] - [VRC]
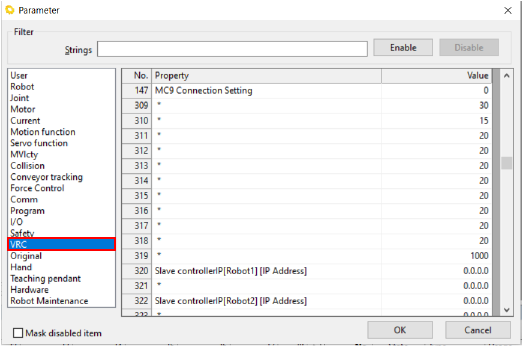
2
将[147:MC9连接设定]、设为[1:有效],按下[OK]。
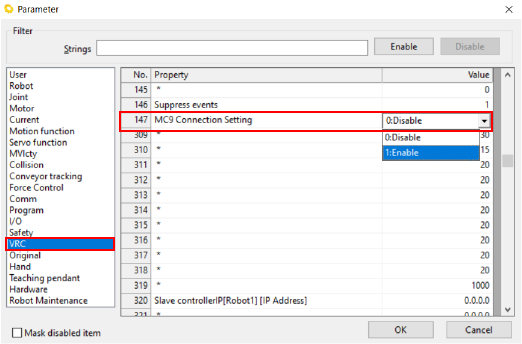
3
将[370:SlaveMotion有效设定]设为[1:有效],按下[OK]。
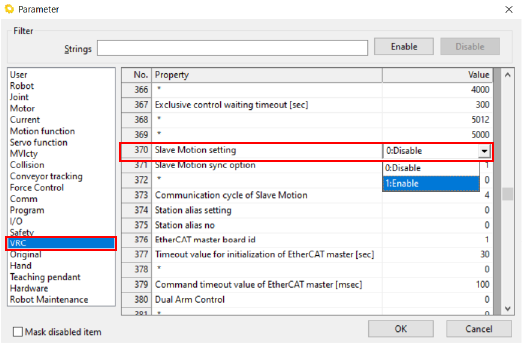
变更后,请向RC8系列控制器发送参数。
详情请参照RC8系列用户手册的ID : 4409和ID : 4410。
发送完成后,请重新启动RC8系列控制器。
如果进行和MC9系列的连接设定,在连接多功能教导器或小型教导器时就会发生等级5错误,从而无法使用除教导器紧急停止输入之外的功能。
ID : 11094
- 本页相关信息
- RC8系列机器人控制器的Hand I/O设定