
ID : 11092
MC9系列的设定
连接MC9系列和RC8系列控制器时,需要创建和对象机器人同一机型、同一设定的MC9用项目。
1
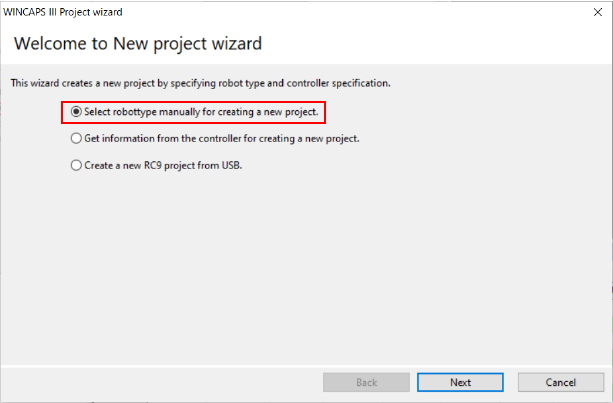
打开WINCAPSIII,打开项目创建向导。
选择[选择机器人类型,并新建],按[下一步]。
操作路径:[文件标签]-[新建项目]
2
按照向导,将各项目设定成与要连接的机器人设定相同。
以下6个项目为“选择机器人类型,并新建”时的设定项目。
- 设定项目名
- 选择机器人类型
- 选择控制器选项
- 选择连接方法
- 设定变量
- 设定I/O端口
在机器人类型选择画面,从[RC9]下方[MC9]文件夹内的机器人选择与要连接到MC9系列机器人相同型号的机器人,然后按[下一步]。
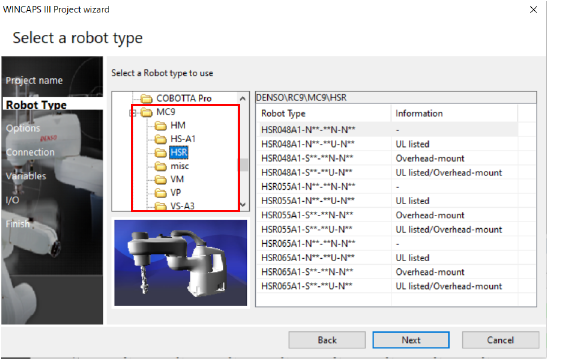
最后显示“完成”画面。确认要创建的项目的内容,若无弄错,选择“项目创建后的动作”,点击“完成”按钮。
详细内容请确认“新建项目”。
3
使用附加轴功能时,进行此STEP的设定。
不使用时,进入下一个STEP4。
打开项目的轴设定表。
操作路径:[项目标签]-[轴设定表]- [轴设定表标签]
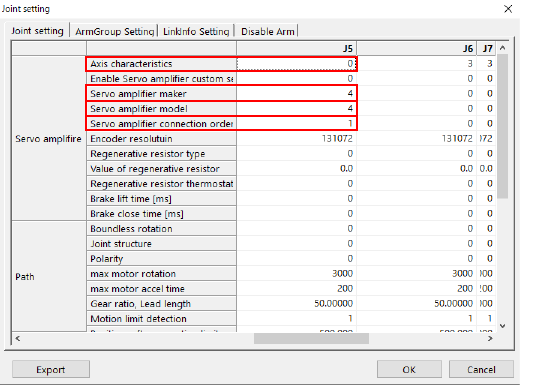
如下变更作为附加轴使用的所有轴设定值。
- 根据附加轴的状态,将[轴有效/无效设定]
设定成[0:有效]或[2:仅编码器有效]。 - 将[放大器厂家]设定成[4:DensoWave]
- 将[放大器机型]设定成[4:RC8]
- 将[伺服放大器连接顺序]设定成[1:1]
请在RC8系列机器人控制器设定与答为附加轴设定的轴编号相同轴编号的轴。
如设定未设定的轴,则将发生错误。
关于参数的详细内容请参照“伺服放大器参数的设定”。
设定结束后按[OK]。保存项目。
4
在MC9系列进行[MC9机器人变更许可],以便将创建的MC9用项目发送到要使用的MC9。
在智能TP、小型教导器都可进行该操作。
4-a 使用智能TP时
启动连接RC8系列控制器的MC9系列,以拥有“维护”用户权限的帐户登录。
然后,请从[选项]画面按下[MC9机器人变更许可]。
操作步骤: [基本画面] - [F6 : 设定] - [F8 : 选项] - [F3 : MC9机器人变更许可]
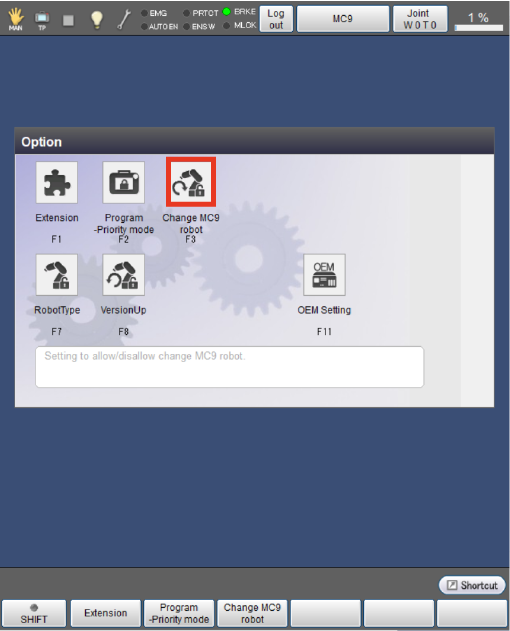
按压[OK]后,显示允许变更的信息。
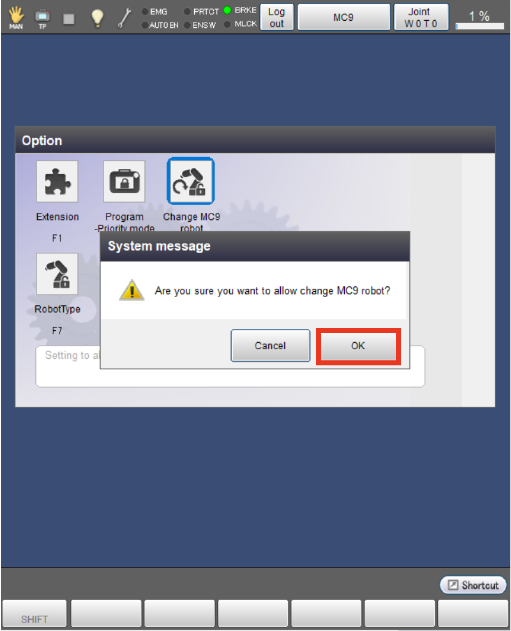
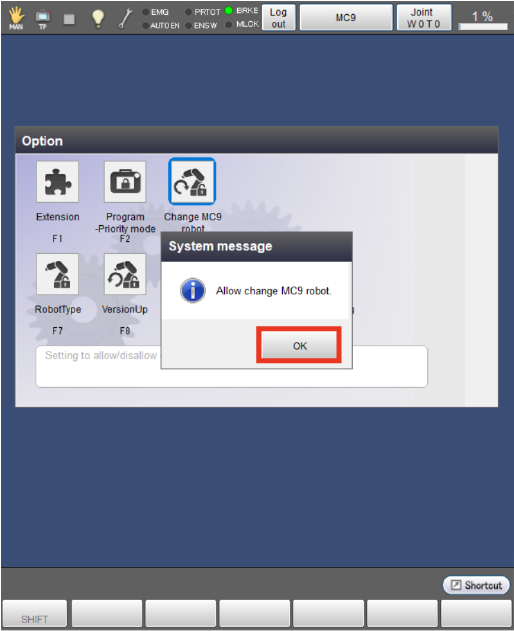
按压[OK]键,则显示如下系统信息。
使用4-b小型教导器时
启动连接RC8系列控制器的MC9系列,以拥有“维护”用户权限的帐户登录。
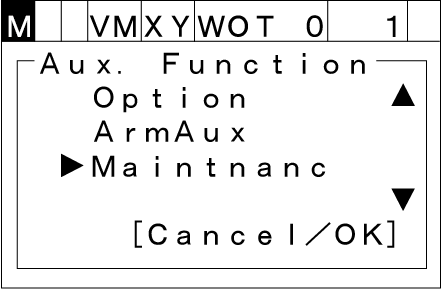
然后,请按下[AUX]键,显示[辅助功能选择画面]。
显示后,用上下光标键选择[Maintnance]。
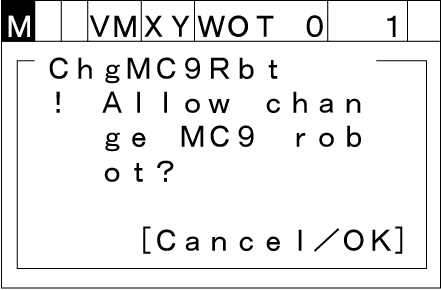
[Maintnance]画面显示后,用上下光标键选择[ChgMC9Rbt]。
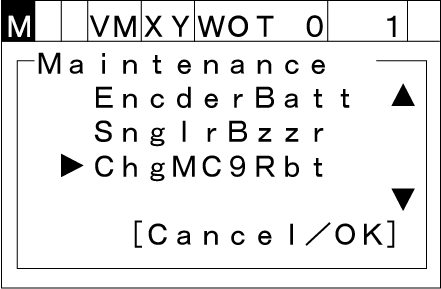
按下[OK]键,则显示如下系统信息。
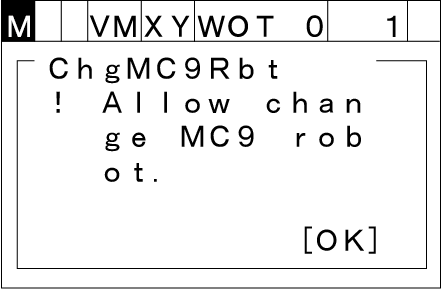
请按下[OK]键。显示以下信息后即完成。
按下[OK]按钮,关闭消息。
5
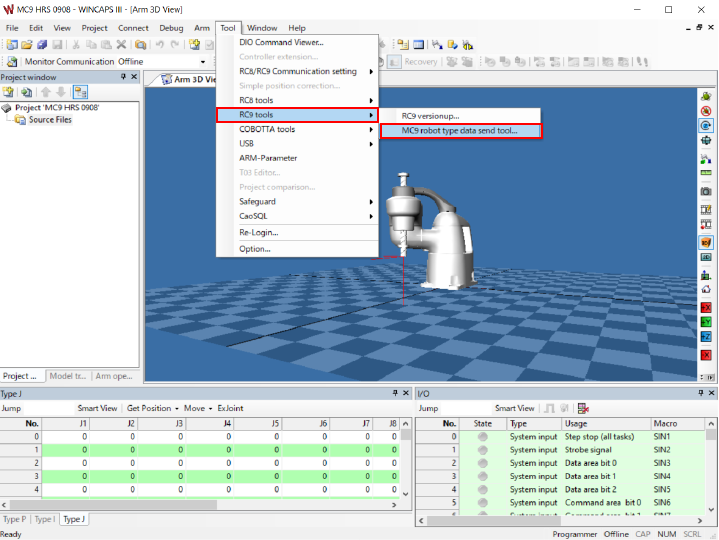
启动WINCAPSIII,利用工具标签内的RC9工具、MC9机器人类型数据发送将数据发送到MC9系列。
操作路径:[工具] - [RC9工具] - [MC9机器人类型数据]
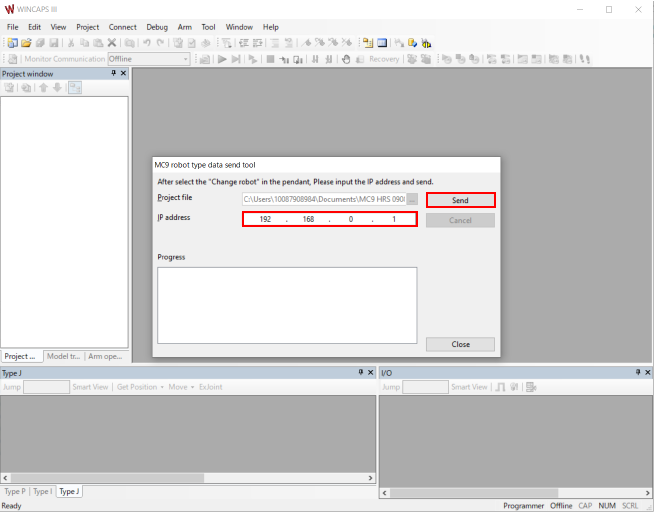
发送完成后,请按照画面指示进行操作。
ID : 11092