
ID : 11089
最佳速度控制功能
MC9系列从运动学设定设定以下机器人类型,通过进行动态设定,即可以使用最佳速度控制功能的[模式1]、[模式3]。
| 名称 | 机器人类型名 | |
|---|---|---|
| H | 4轴SCARA机器人 | |
| 6轴 A型 | 6轴A型机器人 | |
| 6轴 B型 | 6轴B型机器人 | |
关于功能的设定方法,详细内容请确认最佳速度控制功能。
如果没有正确进行动态设定,将可能会发生错误,无法进行PTP动作。
这种情况下,请修改动态设定,或者是将最佳可搬运质量设定变更成[0]后再运行。
动态设定
1
从WINCAPSIII进行动态设定。
请通过WINCAPSIII打开要进行动态设定的项目,显示轴设定表。
操作路径 : [项目标签]-[轴设定表]- [轴设定表标签]
2
将轴设定表标签滚动到下面,设定[动态设定]项目内的参数。
各参数中设定的值请参照下表。
| 参数名 | 设定内容 |
|---|---|
| 连杆重量[kg] | 输入各连杆重量特性的值。 决定参数时, 请参照这里进行决定。 |
| 重心位置X[m] | |
| 重心位置Y[m] | |
| 重心位置Z[m] | |
| 重心周围惯性力矩X[kgm^2] | |
| 重心周围惯性力矩Y[kgm^2] | |
| 重心周围惯性力矩Z[kgm^2] | |
| 机械库仑摩擦[Nm] | 输入各连杆输出侧的摩擦、 粘性常量。 |
| 粘性常量[Nms] | |
| 电机一方的惯量[kgm^2] | 输入从电机转子看到的 惯量。 |
| 电机额定转矩[Nm] | 输入电机目录值。 |
| 电机额定电流指令[A] | |
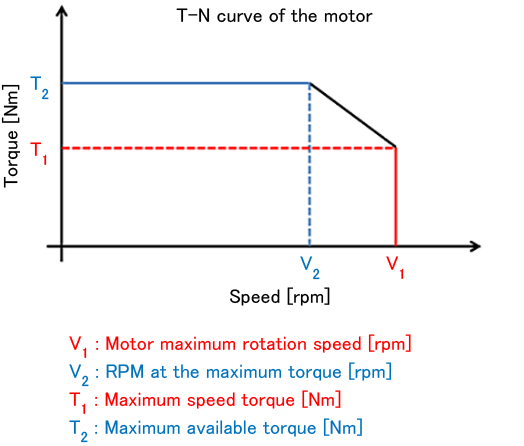
| 最高速度转矩[Nm] | 根据电机目录的TN特性, 输入转速最大时的转矩值。 决定参数时, 请参照这里进行决定。 |
| 转矩极限电机转速[rpm] | 根据电机目录的TN特性, 输入输出最大转矩的最大 转速。 决定参数时, 请参照这里进行决定。 |
| 最高电机转速 [rpm] | 根据电机目录的TN特性, 输入最大转速。 决定参数时, 请参照这里进行决定。 |
| 使用最大转矩[Nm] | 根据电机目录的TN特性, 输入最大转矩。 决定参数时, 请参照这里进行决定。 |
参考
-
6轴机器人的基准坐标系示例
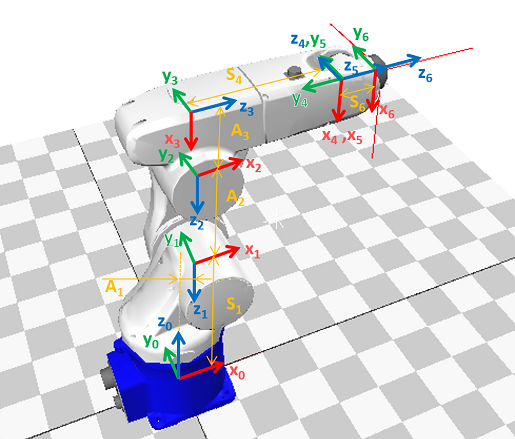
-
4轴机器人的基准坐标系示例
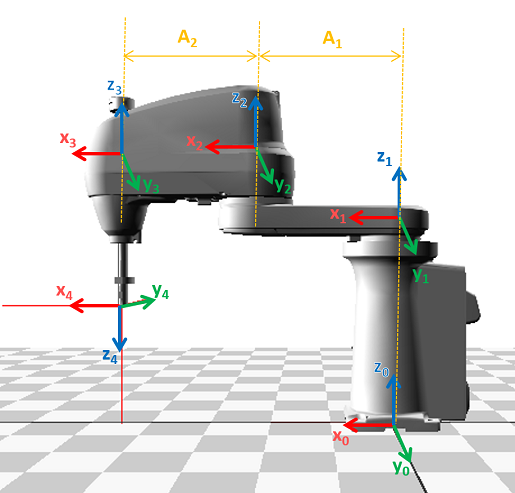
-
电机的T-N曲线和各参数的关系
ID : 11089