
ID : 11082
运动学设定
所谓运动学设定,是能够用MC9系列使客户准备的机器人动作的功能。
按照MC9系列的通常的使用方法,只能控制X-Y载物台或直动坐标系的机器人,但是使用本功能,可在臂前端位置控制SCARA机器人、并联连杆机器人等“有臂的机器人”。
该功能只有MC9系列才能使用。
机器人类型X、XY、XYZ、XYZT的运动学作为MC9系列的标准功能配备。为此,在没有许可证的状态也能利用。不会因为许可证的有无使机器人动作发生差异。
本功能终究是可在臂前端位置控制用户准备的机器人的功能,并非能够以与电装机器人相同的性能动作的功能。重复定位精度等各种性能取决于用户准备的机器人结构。
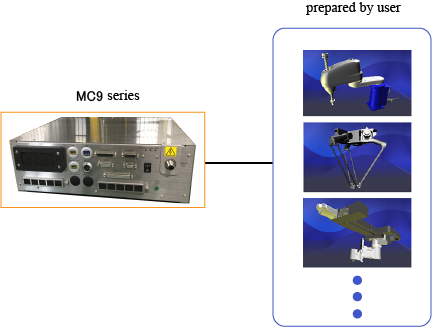
系统构成
本功能除了MC9系列之外,还需要客户自备机器人。
关于MC9系列的系统构成,请参照MC9系列使用说明书的“系统构成图”。
ID : 11082