
ID : 11085
设定项目
使用运动学设定功能,通过MC9系列使客户准备的机器人动作时,使用运动学设定工具编辑WINCAPSIII的项目。
安装WINCAPSIII上时,运动学设定工具被一起安装。
步骤
1
启动运动学设定工具。
操作路径 : PC[开始]按钮 - [DENSO ROBOTICS] - [RC9运动学设定工具]
2
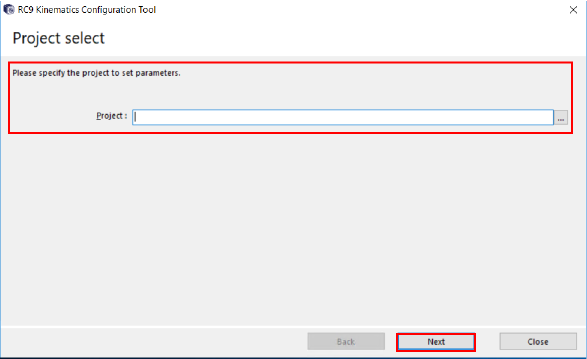
选择从希望进行运动学设定的MC9系列获取的项目,按[下一步]。
3
选择想使其动作的机器人的形状,按[下一步]。
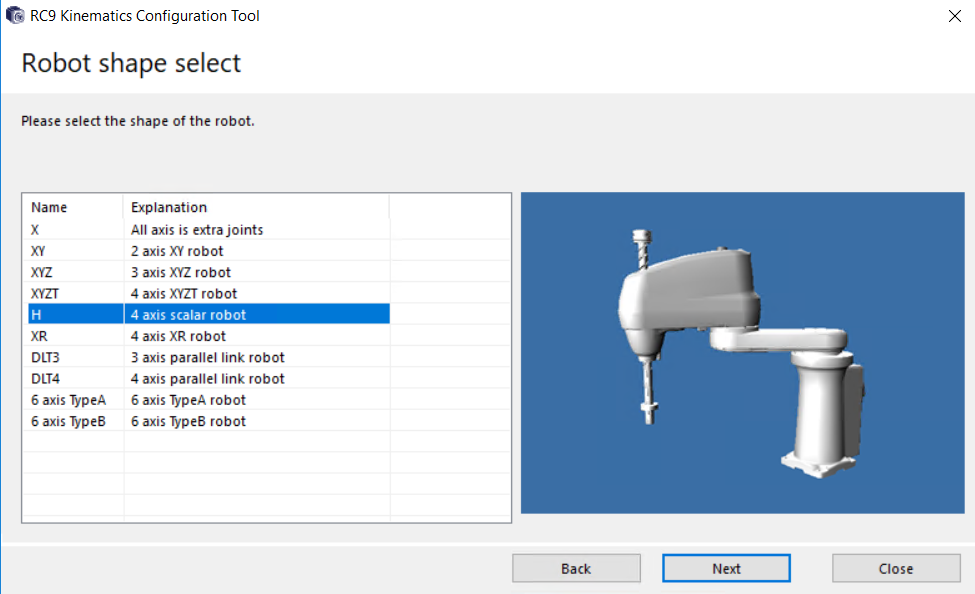
关于可选择的机器人的形状,请参照“机器人类型”。
4
根据选择的机器人类型设定机械臂长度,按[下一步]。
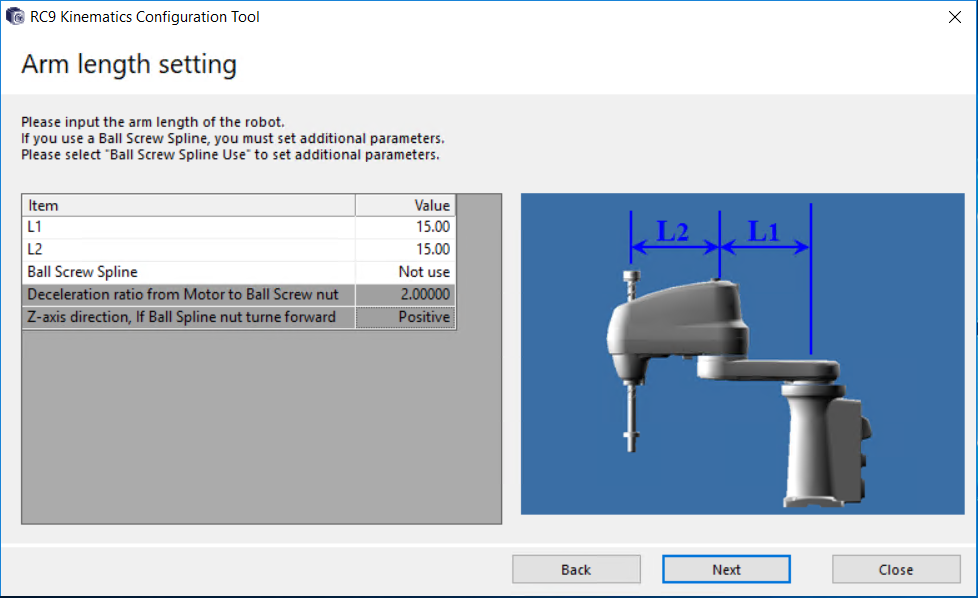
- 作为机械臂长度输入的值有限制。关于机械臂长度的各项目,请参照“机械臂长度设定”。
- 4轴机器人上,在直动轴上利用滚珠丝杠花键轴或6轴机器人上,利用5轴动作干涉6轴的机构时,需要追加的参数设定。详细内容请参照“4轴或6轴机器人的追加设定”。
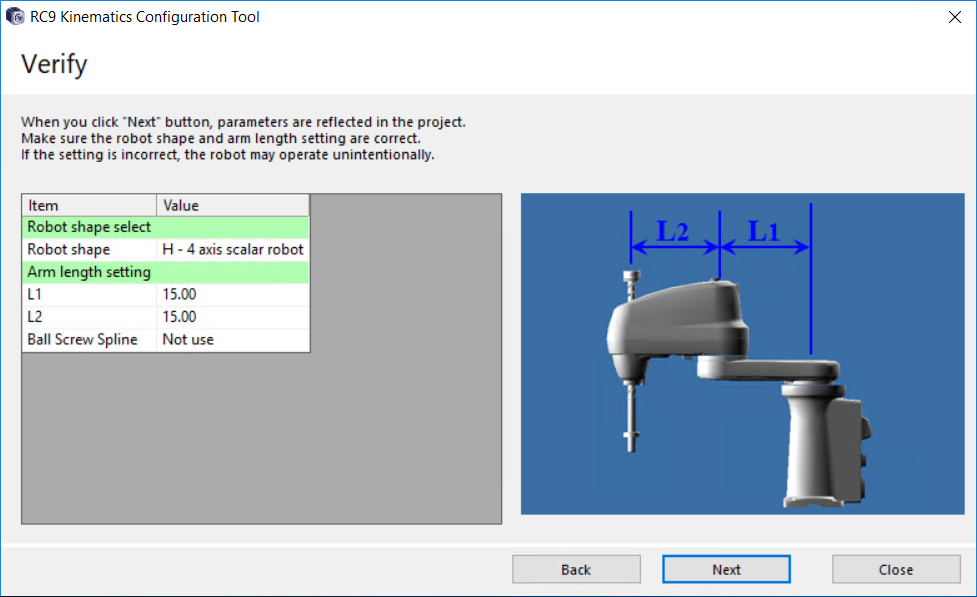
5
在确认画面上确认设定内容,按[下一步]。
如果设定错误,机器人可能执行意外的动作。
请务必确认设定没有错误。
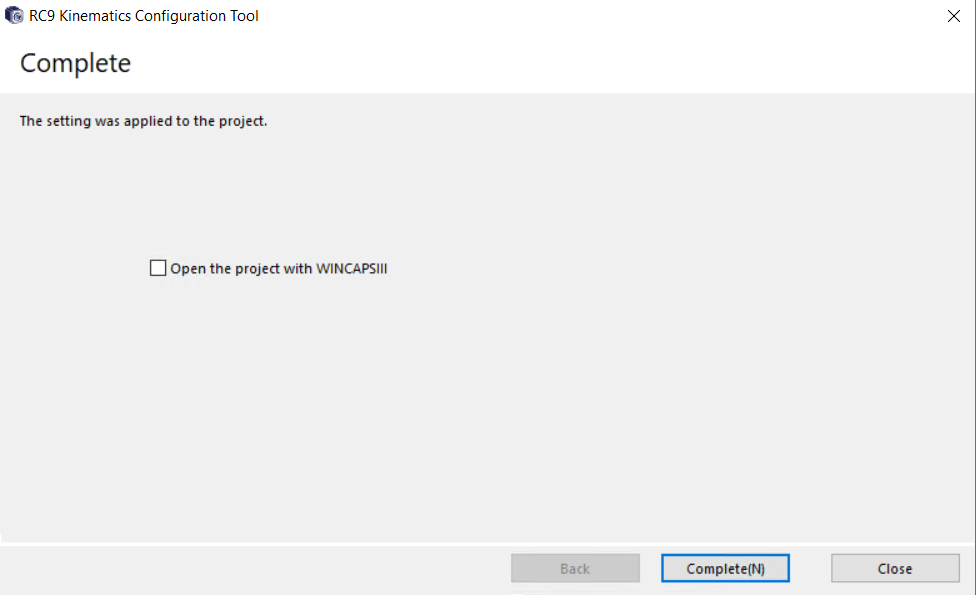
6
按下[完成],对项目的运动学设定结束。
如果勾选“用WINCAPSIII打开项目”,在按[完成]后WINCAPSIII启动。
ID : 11085