
ID : 9690
伺服状态显示
操作路径:[F2 机械臂] - [F3 伺服状态] - [监视器 标记]
显示机器人的伺服状态。
可在上下分别选择显示项目,因此,可同时监视2个项目。
如果按压[监视器],则显示以下的[伺服状态]画面。
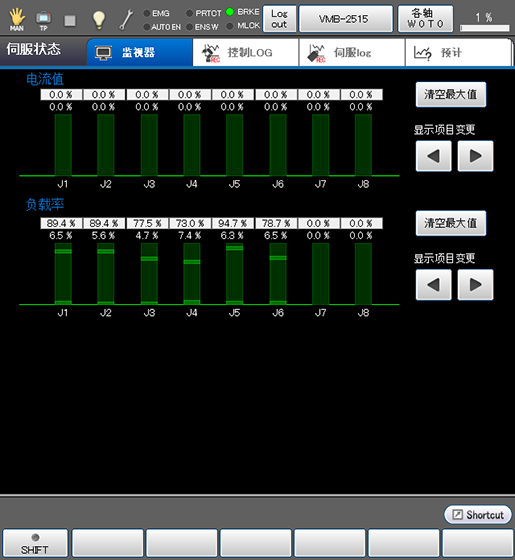
| 可使用的键 | |
|---|---|
| 清空最大值 | 取消各伺服状态下记录的最大值。 |
| 显示项目变更 |
每次按压箭头键,切换显示的项目。 可切换的项目为[电流值]和[负荷率]。 |
电源接通后,负荷率接近80%,但该规格在过载状态下切断电源后马上接通电源时也安全。
ID : 9690
- 本页相关信息
- 控制Log的获取、显示、保存
- 伺服LOG的获取、显示
- 预计负载率的显示