
ID : 9691
控制Log的获取、显示、保存
操作路径:[F2 机械臂]-[F3 伺服状态]-[控制LOG 标记]
获取各轴的指令值、编码器值、电流值、负荷率的各项目以及用户数据(SysLOG.Ctrl.UserData)的控制LOG,在智能TP的画面上进行图表显示。各轴的控制Log可同时显示5个项目。
并且,可保存获取的控制Log。
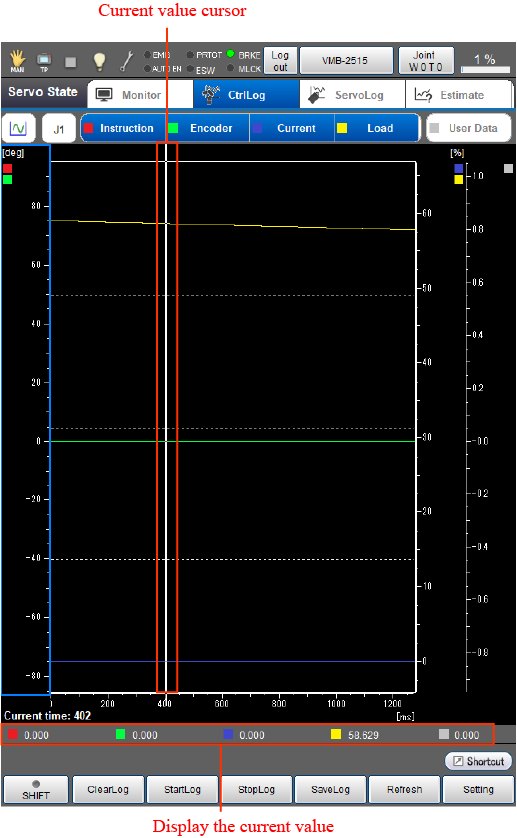
如果按压[控制LOG标记],则显示以下[控制LOG]画面。
由于控制LOG和伺服LOG使用同一环形缓冲区,因此执行一个LOG的记录/记录停止/清空,另一个LOG也会执行相同的操作。
触摸左上角的图标后显示下拉菜单,可变更图表的操作模式。图表的操作模式有以下3种。
| 操作模式 | 说明 | 左右键 | 上下键 | 触摸画面 |
|---|---|---|---|---|
 移动显示位置 |
移动图表轴的显示位置。 | 移动X轴的显示位置。 | 移动所选Y轴的显示位置。 | 移动X轴的显示位置。 |
 变更显示尺寸 |
增减图表轴的显示范围。 | 增减X轴的显示范围。 | 增减所选Y轴的显示范围。 | 移动X轴的显示位置。 |
 查看当前值 |
显示所选位置的值。所选位置为执行机器人动作命令的位置时,图表右上角显示[程序]、[行编号]。 | 当前值的光标移动。 | 不使用。 | 当前值的光标移动至触摸位置。 |
| 可使用的功能键 | |
|---|---|
| [F1 清空](*) | 初始化控制LOG和伺服LOG的数据。 清空环形缓冲区,写入新log。 |
| [F2 开始记录](*) | 开始获取控制LOG和伺服LOG。 如果开始获取控制LOG和伺服LOG,则控制LOG标记和伺服LOG标记图标上的REC亮灯。 |
| [F3 停止记录](*) | 结束获取控制LOG和伺服LOG。 如果结束获取控制LOG和伺服LOG,则控制LOG标记和伺服LOG标记图标上的REC熄灭。 |
| [F4 保存](*) | 将取得的控制Log保存到保存用存储器。 |
| [F5 显示更新](*) | 将智能TP的控制LOG显示画面更新为最新的信息。 |
| [F6 设定] | 显示[控制LOG设定]画面。 可进行控制log相关设定的确认和变更。 |
| [F7 切换Y轴值显示方向] | 图表Y轴刻度的显示形式变更为纵向/横向。 将Y轴刻度设定为纵向,可扩大图表的显示领域。 |
| [F8 显示范围变更] | 变更X/Y轴的显示范围。 按压[F8 显示范围变更]后显示[显示范围变更]画面,从下面选择显示范围的变更方法。
|
(*)此项目仅在对登录帐户授予“编程”或“维护”的用户权限时可以操作。
| 功能键以外的键 | |
|---|---|
|
如果按压按钮,则显示下拉菜单。 可显示J1~J8的各轴数据。 |
| 指令值 | 显示指定轴的指令值信息。[deg or mm] 选择后,显示红色的图表。 |
| 编码器值 | 显示指定轴的编码器值信息。[deg or mm]
选择后显示绿色图表。 |
| 电流值 (额定比) |
显示指定轴的电流值信息。[%] 选择后显示蓝色图表。 |
| 负载率 | 显示指定轴的负载率信息。[%] 选择后,显示黄色的图表。 |
| 用户数据(SysLog.Ctrl.UserData) | 显示用户数据。 选择后显示灰色图表。 |

使用插件可从外部设备获取控制Log。详细内容请参照“LOG数据的获取”。
ID : 9691
- 本页相关信息
- 控制LOG设定的显示和变更