
ID : 10973
軌道設定パラメータの設定
付加軸の動作条件(速度、加速度、可動範囲など)を設定します。
WINCAPSIIIでの設定方法
1
WINCAPSIIIのプロジェクトタブ内の、軸設定表を選択してください。
2
表示される軸設定画面内、軸設定表タブの軌道設定のパラメータを変更してください。
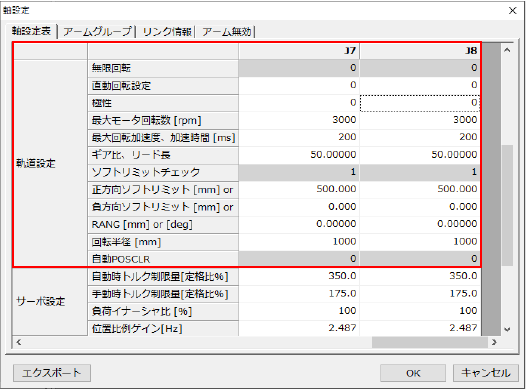
変更したいパラメータの設定が完了後、[OK]を押します。
[OK]を押すと、設定が保存されます。
各パラメータの詳細は、ページ末尾の「軌道パラメータ一覧」を参照ください。
TPでの設定方法
1
基本画面-[F2 アーム]-[F12 保守]-[F10 軸設定]を押します。
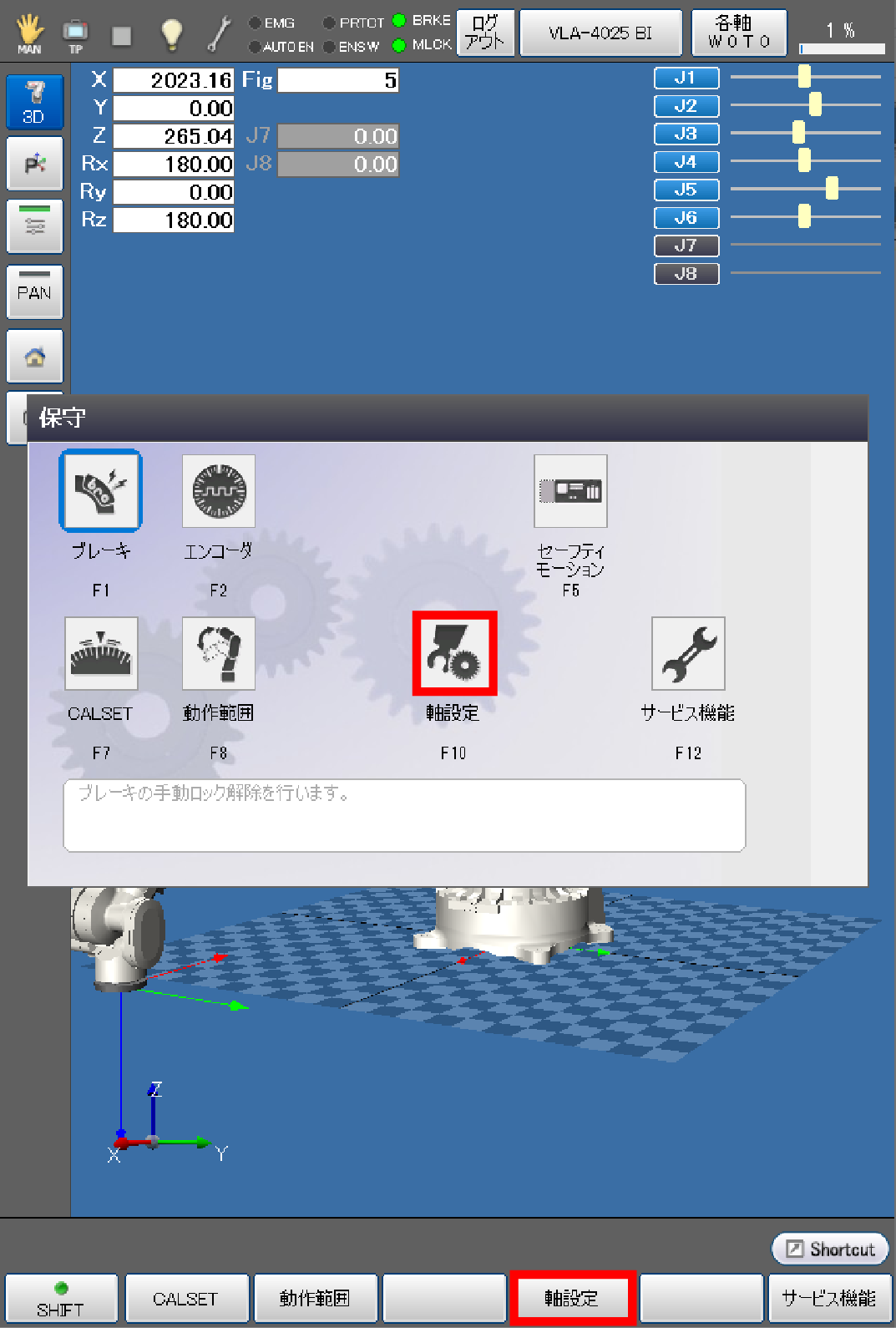
"軸設定"画面が表示されたら、[F4 軌道設定]を押します。
2
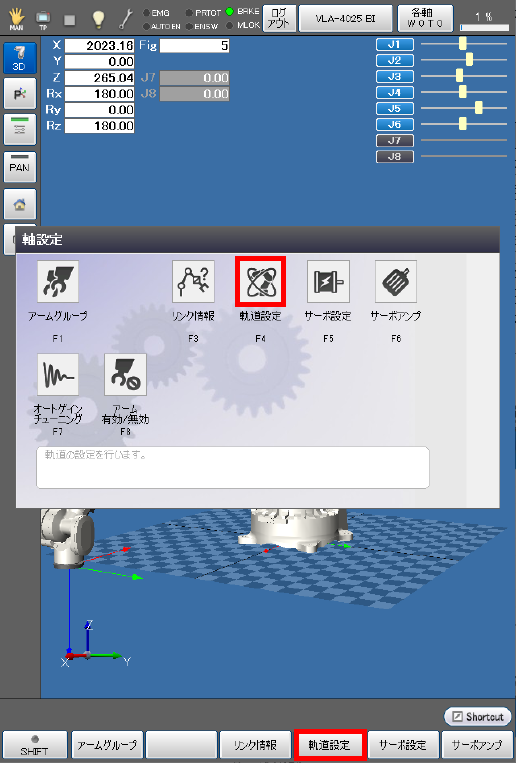
[F4 軌道設定]を押した後に、表示される画面で軌道設定パラメータの設定が可能です。
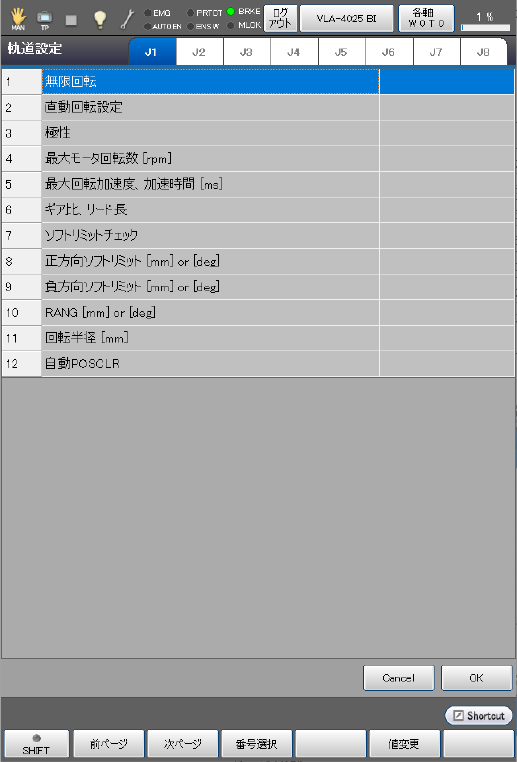
3
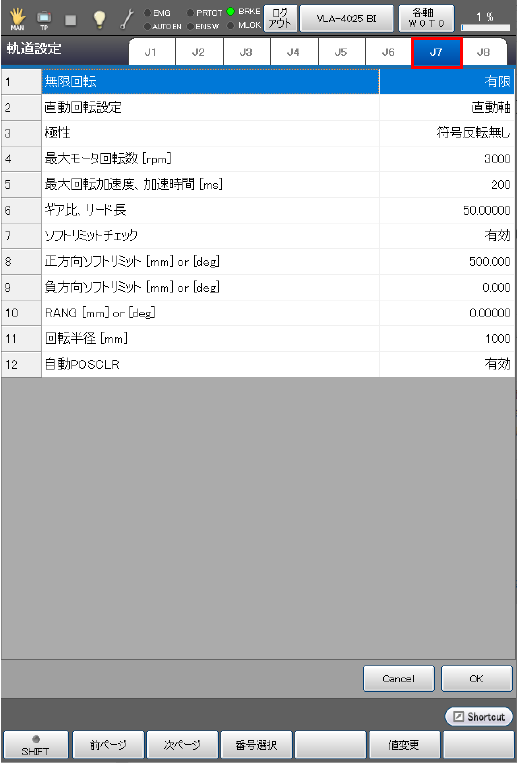
軌道設定パラメータを設定したい軸のタブを選択します。
軌道設定パラメータの各設定を変更し、[OK]を押します。
各パラメータの詳細は、以下の「軌道パラメータ一覧」を参照ください。
4
すべての軌道設定パラメータの設定が完了後、[OK]を押します。
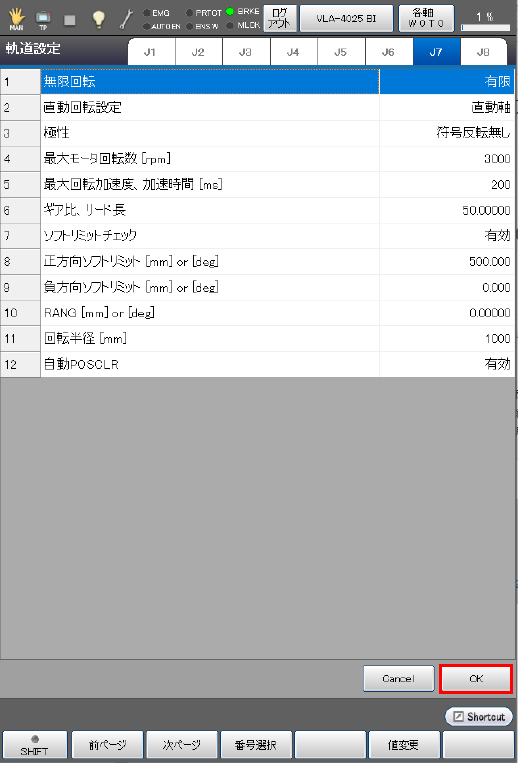
登録した軌道パラメータの設定が保存され、「軸設定」画面に戻ります。
軌道パラメータ一覧
| パラメータ名 | 設定範囲 | 出荷時設定値 | 単位 | 内容 | 備考 |
|---|---|---|---|---|---|
|
無限回転 (有限、無限) |
"有限" または "無限" |
有限 | モータを一定方向に32768回転以上回転させる場合、"無限"に設定してください。 | 無限に設定したときは、ソフトウェアリミットチェックの設定を"なし"にしてください。 | |
|
直動回転設定 (直動軸、回転軸) |
"直動軸" または "回転軸" |
直動軸 | モータを接続する付加軸が、直動軸の場合は"直動軸"、回転軸の場合は"回転軸"を設定してください。 | ||
|
極性 |
"0:符号反転無し" または "1:符号反転有り" |
0:符号反転無し | 付加軸を+方向に移動させた場合の回転方向と、反転させたい場合は、"1:符号反転有り"に変更して下さい。 | +方向に移動させた場合の回転方向は、利用するアンプメーカによって異なりますので注意して下さい。 | |
| 最大モータ回転数[rpm] | 1~ 6000 |
3000 | rpm | モータの最大回転数を設定してください。 | |
| 最大回転加速度 加速時間[ms] | 1~ 100000000 |
200 | ms | モータが最高速度に達するまでの加速時間を設定してください。 | |
| ギア比、リード長 | 0.00001~ 21474.83647 |
50.00000 | 回転軸の場合は減速比(モータ回転量/軸回転量)を、直動軸の場合はモータ1回転あたりの移動量(リード)を、設定してください。 | ||
ソフトウェアリミットチェック |
"無効"または"有効" | 有効 | 動作範囲をチェックし、範囲外時にエラーとする場合は"有効"を設定してください。 | 無限回転設定を"無限"に設定した場合は、この設定を"無効"にしてください。 | |
| 正方向ソフトウェアリミット[mm]、[deg] | -1000000~ 1000000 |
500 |
回転軸時:deg 直動軸時:mm |
正方向の動作範囲を設定してください。 | |
| 負方向ソフトウェアリミット[mm]、[deg] | -1000000~ 1000000 |
0.000 |
回転軸時:deg 直動軸時:mm |
負方向の動作範囲を設定してください。 | |
| RANG[mm]、[deg] | -21474.83648~ 21474.83648 |
0.00000 |
回転軸時:deg 直動軸時:mm |
RANG値を設定してください。 | |
| 回転半径[mm] | 0~ 100000 |
1000 | mm |
回転軸の場合は、最大の回転半径を設定してください。 直動軸の場合は、設定は不要です。 |
設定時の詳細は、「回転半径の設定」を参照ください。 |
| 自動POSCLR | "無効" または "有効" |
有効 |
自動でPOSCLRを行なうかを設定します。 |
(注1) |
(注1) :自動POSCLRが"有効"で現在位置が360°の倍数の場合、通常は0°に変更されますが、内部の演算誤差により、360°に変更される場合があります。-方向の360°の倍数の場合は、同様に-360°に変更される場合があります。そのため、直後の動作命令では、意図しない動作になることがありますので、ご注意ください。
ID : 10973