
ID : 10972
サーボアンプパラメータの設定
RC9コントーラへ接続する、サーボアンプのパラメータを設定します。
WINCAPSIIIでの設定方法
1
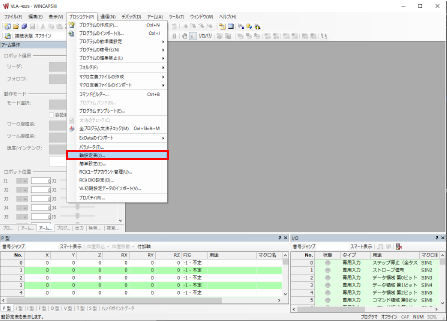
WINCAPSIIIのプロジェクトタブ内の、軸設定表を選択してください。
2
表示される軸設定画面内、軸設定表タブのサーボアンプのパラメータを変更してください。
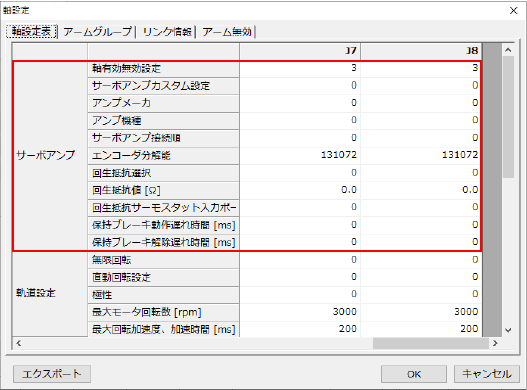
変更したいパラメータの設定が完了後、[OK]を押します。
[OK]を押したのち、設定が保存されます。
下表の7個のパラメータは、スマートTPから設定を行う事ができません。
パラメータの設定を行う場合は、WINCAPSIIIから設定を行って下さい。
| 項目 | パラメータ名 |
|---|---|
| サーボアンプ | サーボアンプカスタム設定 |
| アンプメーカ | |
| アンプ機種 | |
| サーボアンプ接続順 | |
| 回生抵抗選択 | |
| 回生抵抗値 | |
| 回生抵抗サーモスタット入力 | |
| 保持ブレーキ動作遅れ時間 | |
| 保持ブレーキ解除遅れ時間 |
各パラメータの詳細は、ページ末尾の「サーボアンプパラメータ一覧」を参照ください。
TPでの設定方法
1
基本画面-[F2 アーム]-[F12 保守]-[F10 軸設定]を押します。
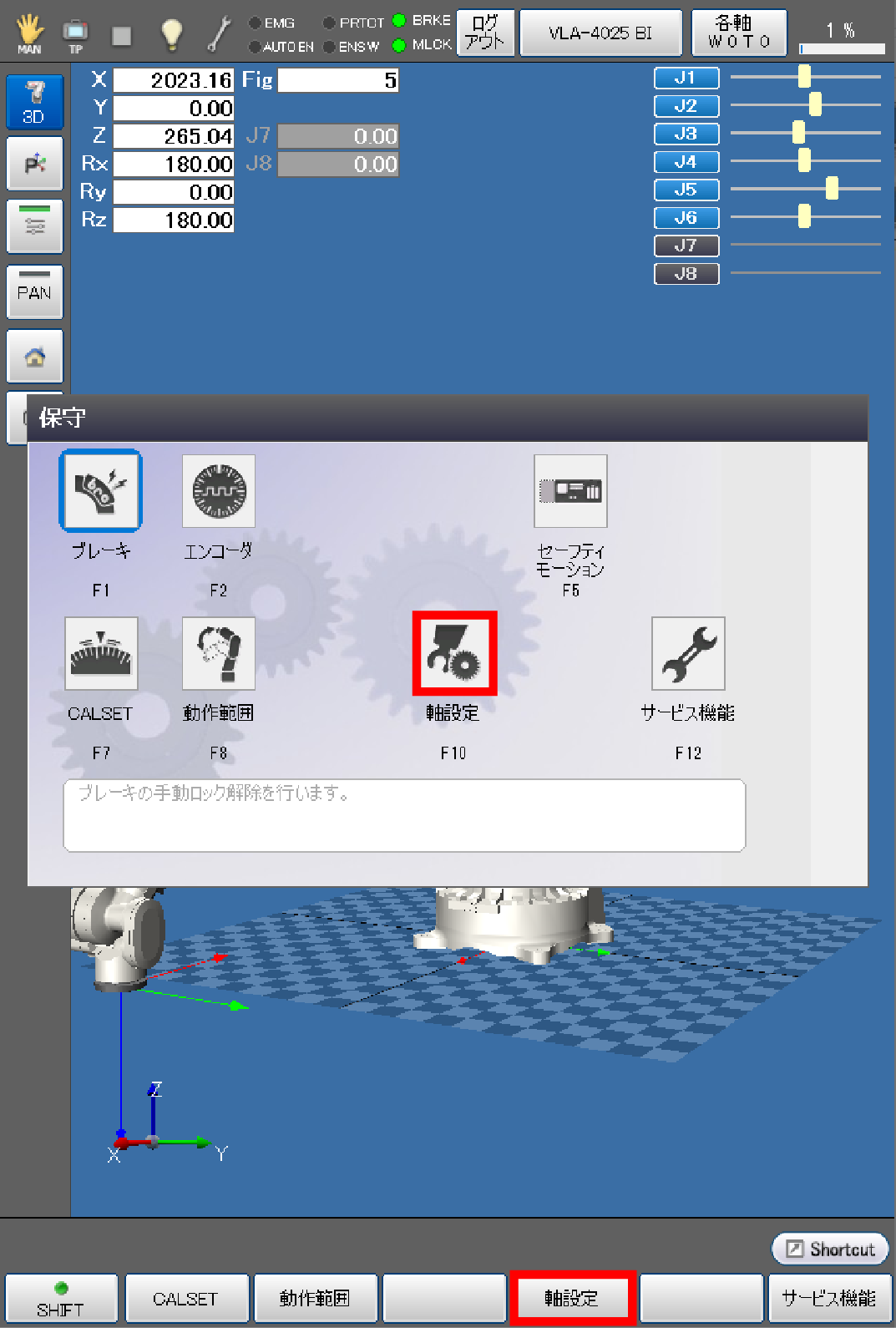
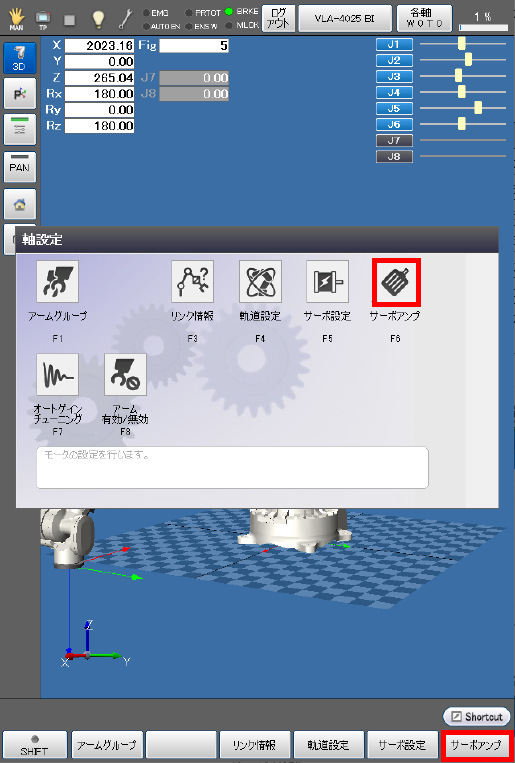
"軸設定"画面が表示されたら、[F6 サーボアンプ]を押します。
2
[F6 サーボアンプ]を押した後に、表示される画面でサーボアンプパラメータの表示と設定が可能です。
スマートTPで変更が可能なサーボアンプパラメータは[軸有効無効設定]のみです。
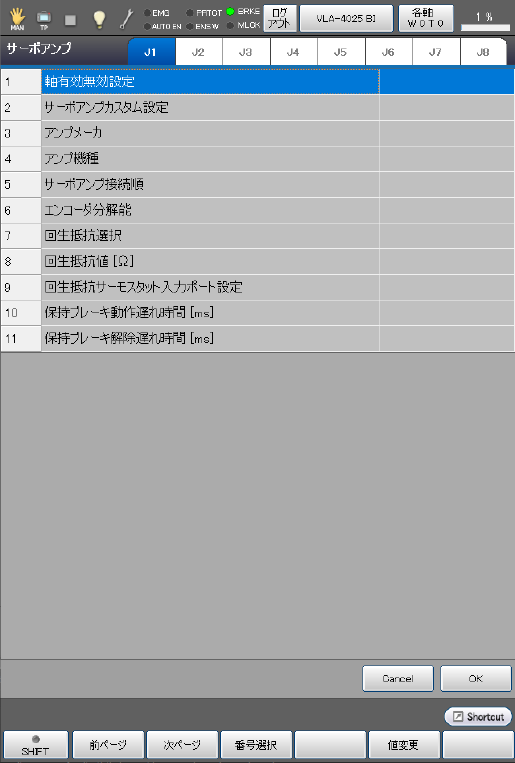
3
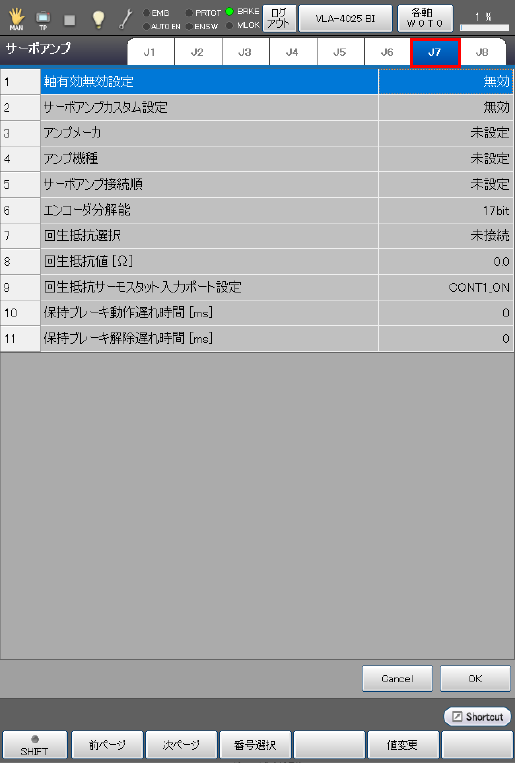
サーボアンプパラメータの設定を変更、確認したい軸のタブを選択します。
サーボアンプパラメータのパラメータを変更した場合、[OK]を押します。
各パラメータの詳細は、以下の「サーボアンプパラメータ一覧」を参照ください。
4
サーボアンプパラメータの設定変更、確認が完了後、[OK]を押します。
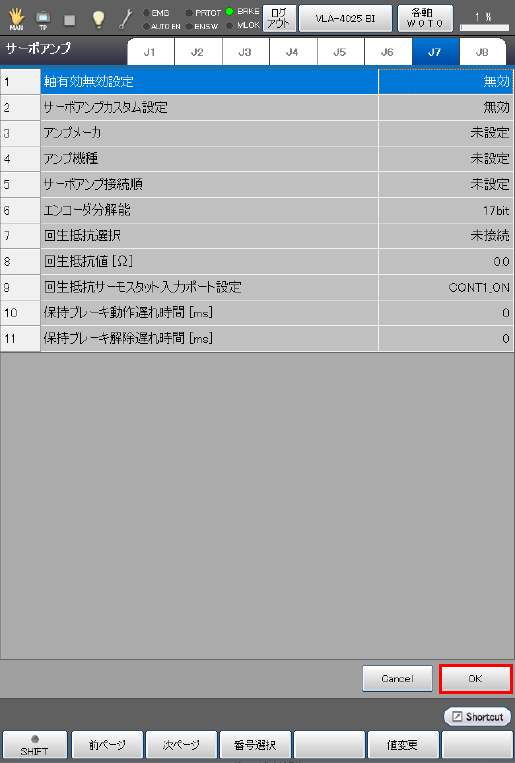
「軸設定」画面に戻ります。
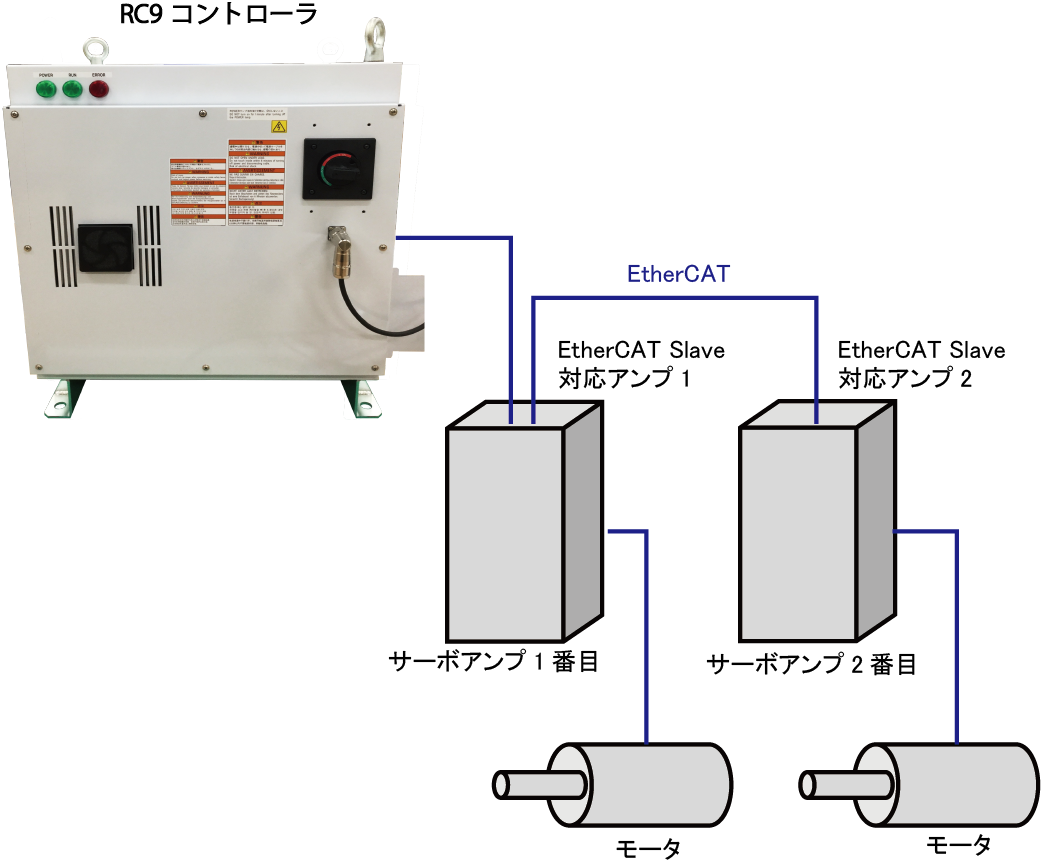
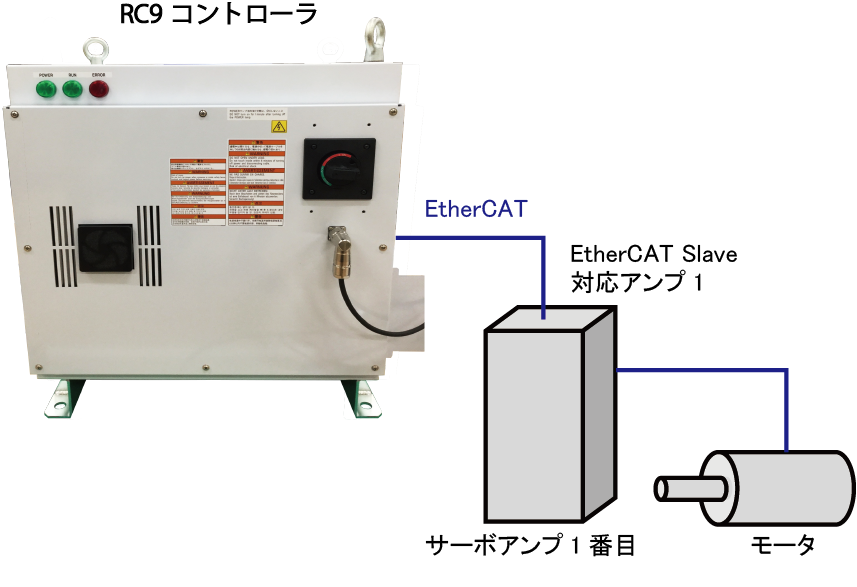
サーボアンプ接続順
サーボアンプ接続順は、RC9ロボットコントローラと接続された付加軸用サーボアンプの中から、どのサーボアンプを設定軸に対応させるかを決定するパラメータです。
サーボアンプ接続順には、RC9ロボットコントローラから見て、何番目に接続されているサーボアンプかを設定します。
サーボアンプ接続順は、6軸ロボット利用時には[1:1番目]、[2:2番目]のみを利用します。
サーボアンプ接続順の設定を間違えた場合、意図しない軸が動作することがあります。十分に注意してパラメータ設定を行ってください。
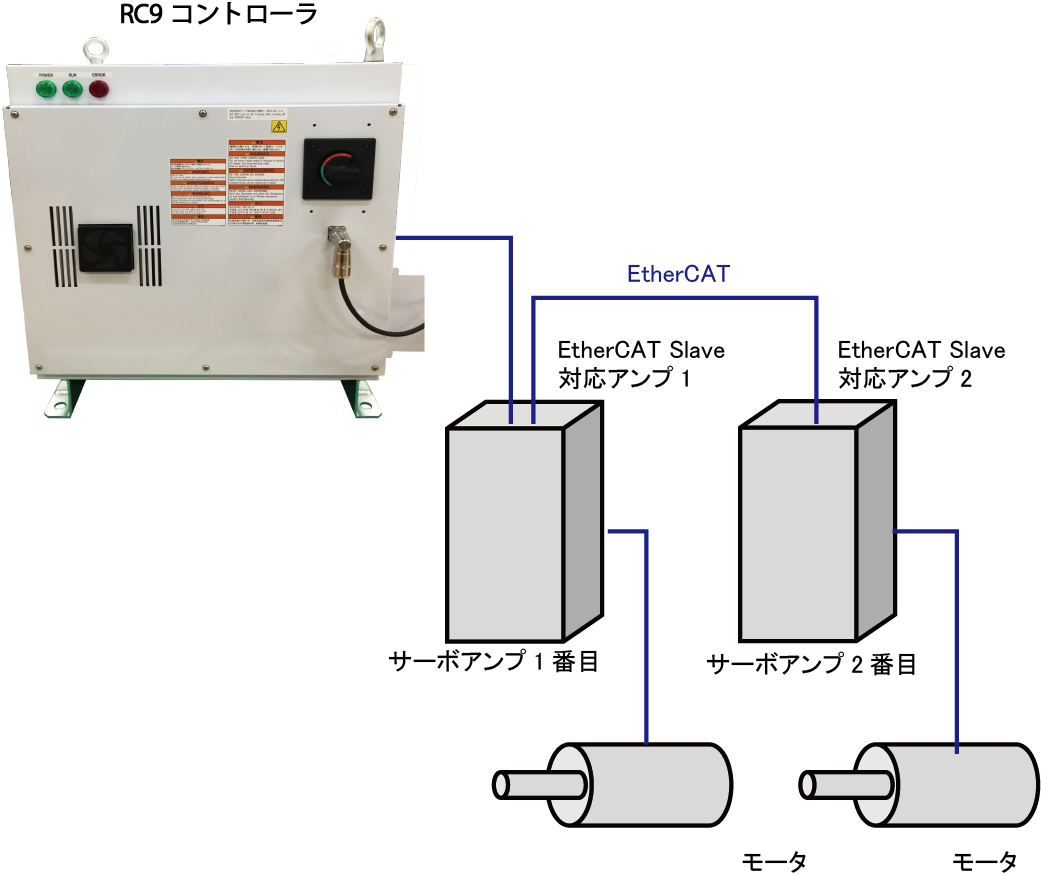
サーボアンプ接続順を重複させた場合や、順番が正しく設定されずに番号が抜けていた場合は下記のように設定されます。
サーボアンプ接続順を重複させた場合
以下のようにサーボアンプ接続順を重複させた場合は、図中のEtherCAT Slave対応アンプ1がJ7として認識されます。
この際、EtherCAT Slave対応アンプ2は設定されず、J7としてもJ8としても操作はできません。
| 設定軸 | サーボアンプ接続順 |
|---|---|
| J7 | 1:1番目 |
| J8 | 1:1番目 |
この場合、RC9ロボットコントローラの電源投入時にEtherCAT Slave対応アンプ2が接続されている場合、"[84400A2A]EtherCATスレーブデバイスの誤接続を検出しました。"が発生します。
パラメータを正しく設定しなおしてください。
サーボアンプ接続順を歯抜けにした場合
以下のようにサーボアンプ接続順を設定した場合、EtherCAT Slave対応アンプ1は、J7軸として認識されます。
| 設定軸 | サーボアンプ接続順 |
|---|---|
| J7 | 2:2番目 |
J7軸を付加軸として動作させることは可能ですが、安全のため、正しく設定しなおしてください。
6軸ロボット利用時に1,2番目以外を指定した場合
以下のようにサーボアンプ接続順を設定した場合、EtherCAT Slave対応アンプ1がJ7軸、EtherCAT Slave対応アンプ2がJ8軸として認識されます。
| 設定軸 | サーボアンプ接続順 |
|---|---|
| J7 | 3:3番目 |
| J8 | 4:4番目 |
J7軸、J8軸を付加軸として動作させることは可能ですが、安全のため、正しく設定しなおしてください。
サーボアンプパラメータ一覧
| パラメータ名 | 設定範囲 | 出荷時設定値 | 単位 | 内容 | 備考 |
|---|---|---|---|---|---|
| 軸有効無効設定 | 0:有効 3:無効 |
3:無効 | 対象の軸の有効無効 を設定します。 |
||
| サーボアンプカスタム設定 | 0:無効 1:有効 |
0:無効 | サーボアンプの設定をRC9機能を 利用せずに行うかを設定します。 |
詳細はこちらをご覧ください。 | |
| アンプメーカ | 0:未設定 1:Sanyo 4:DensoWave |
0:未設定 | 付加軸機能で利用する サーボアンプのメーカを指定します。 |
*1 | |
| アンプ機種 | 0:未設定 1:R3E 4:RC8 |
0:未設定 | 付加軸機能で利用する サーボアンプの機種をを指定します。 |
*1 | |
| サーボアンプ接続順 |
0:未設定 1:1番目 2:2番目 3:3番目 4:4番目 5:5番目 6:6番目 7:7番目 8:8番目 |
0:未設定 | 動作させたいモータがつながったサーボアンプの、RC9ロボットコントローラからのデイジーチェーン接続順を設定します。 |
詳細はこちらをご覧ください。 | |
| エンコーダ分解能 |
131072: 17bit |
131072: 17bit |
接続したサーボアンプで利用するエンコーダの分解能を指定します。 | ||
| 回生抵抗選択 |
0:未接続 1:内蔵 2:外付け |
0:未接続 | 回生抵抗が内蔵か、外付けかを設定します。 | ||
| 回生抵抗値 | 0.0-100.0 | Ω | 回生抵抗の抵抗値を設定します。 | 回生抵抗外付け選択時のみ設定してください。 | |
| 回生抵抗サーモスタット入力 |
-2:未設定 0:CONT1_ON 1:CONT1_OFF 2:CONT2_ON 3:CONT2_OFF 4:CONT3_ON 5:CONT3_OFF 6:CONT4_ON 7:CONT4_OFF 8:CONT5_ON 9:CONT5_OFF 10:CONT6_ON 11:CONT6_OFF 12:CONT7_ON 13:CONT7_OFF |
回生抵抗のサーモスタット入力のポートを設定します。 | 回生抵抗外付け選択時のみ設定してください。 | ||
| 保持ブレーキ動作遅れ時間 | 0-1000 | 0 | ms | ブレーキ解除推奨回路を利用する際の、保持ブレーキ動作遅れ時間を設定します。 | ブレーキ保持回路を利用する場合のみ、利用するモータもしくは、サーボアンプに応じた値を設定してください。 |
| 保持ブレーキ解除遅れ時間 | 0-1000 | 0 | ms | ブレーキ解除推奨回路を利用する際の、保持ブレーキ解除遅れ時間を設定します。 | ブレーキ保持回路を利用する場合のみ、利用するモータもしくは、サーボアンプに応じた値を設定してください。 |
| *1: |
アンプメーカ、アンプ機種の組み合わせを間違えた場合「EtherCATスレーブデバイスの誤接続を検出しました。」のエラーが発生します。 エラーが発生した場合、設定が間違っていないか確認してください。
例 |
ID : 10972