
ID : 10970
付加軸の有効化設定
付加軸機能を利用する場合、ロボットプロジェクトを付加軸ありの設定にする必要があります。
ロボットを付加軸あり設定にする場合、以下の2パターンがあります。
新規にプロジェクトを作成する場合
WINCAPSIIIを用いてプロジェクトを新規作成します。
プログラム作成中に表示される、コントローラオプションの選択画面で、付加軸ありを指定してください。
WINCAPSIIIの起動方法、プロジェクトの新規作成についてはこちらを参照ください
すでにあるロボットプロジェクトの付加軸を有効にする場合
1
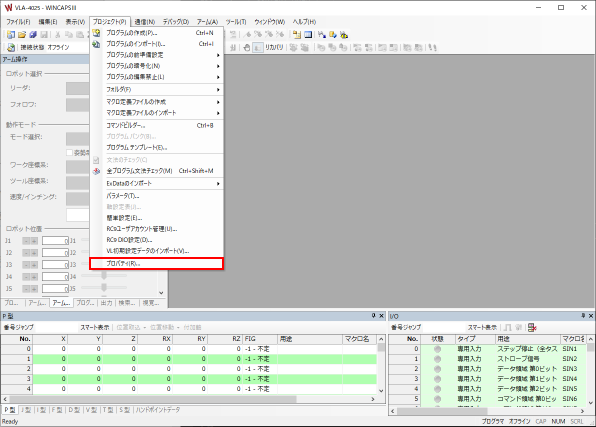
WINCAPSIIIのプロジェクトタブ内の、プロパティを選択してください。
2
プロジェクトのプロパティが表示されたら、付加軸欄の[変更]を選択し、付加軸ありに変更します。
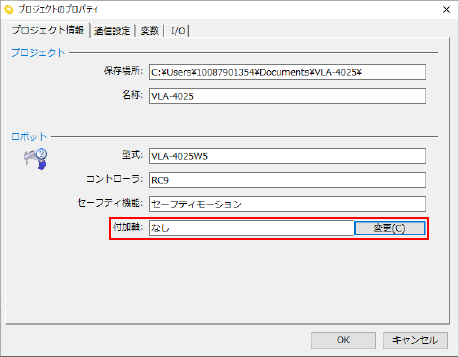
実際のロボットに付加軸を追加したい場合には、利用しているRC9ロボットコントローラよりプロジェクトを取得し、設定を行ってください。
すでに利用しているロボットに付加軸を追加する場合
1
RC9ロボットコントローラより、付加軸を追加したいロボットのプロジェクトを取得します。
2
取得したプロジェクトの付加軸設定を有効にします。
付加軸設定を有効にする方法は、こちらを参照してください。
3
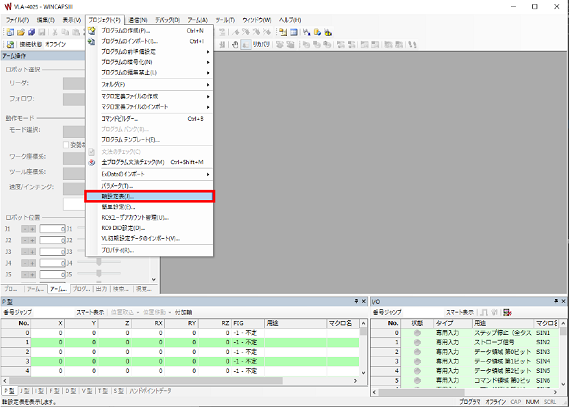
WINCAPSIIIのプロジェクトタブ内の、軸設定表を選択してください。
4
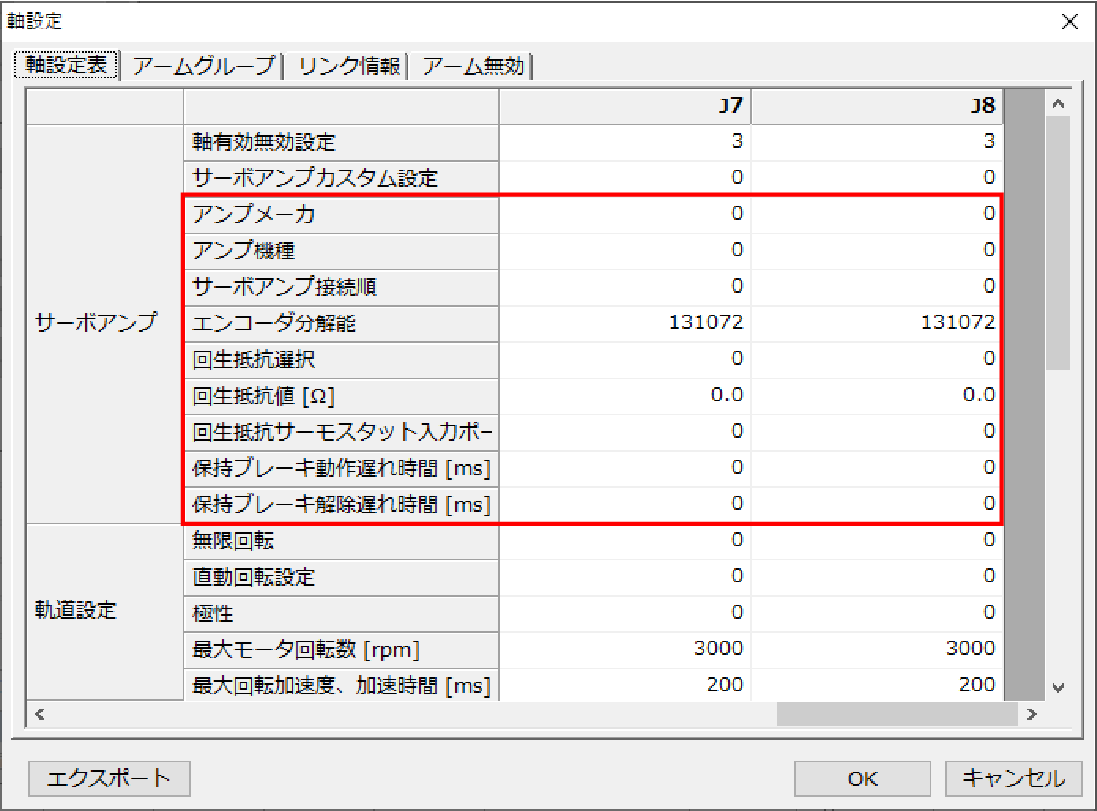
軸設定画面の軸設定表タブを開き、付加軸として利用する軸のパラメータを設定します。
ここでは、以下のパラメータを設定してください。
これらのパラメータは、WINCAPSIIIからのみ設定が可能なパラメータです。
各パラメータの詳細については、[サーボアンプパラメータの設定]をご参照ください。
| 内容 |
|---|
アンプメーカ接続するサーボアンプのメーカを指定します。 |
アンプ機種接続するサーボアンプの機種を指定します。 |
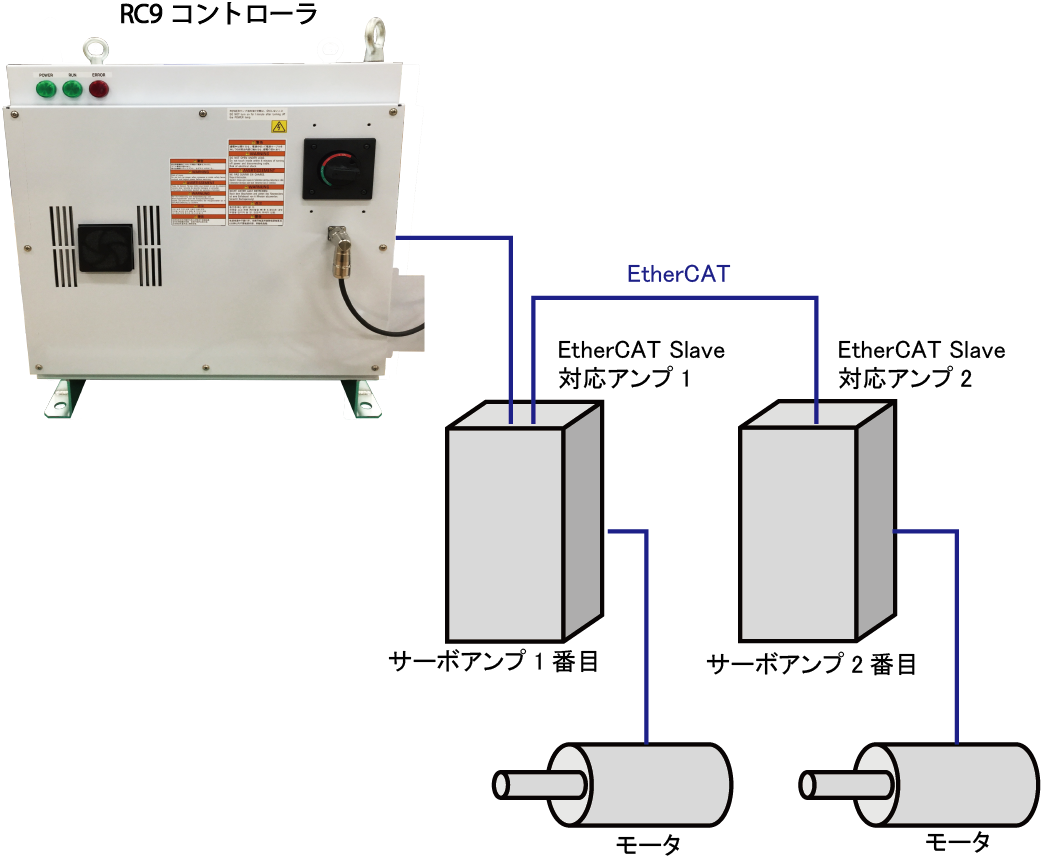
サーボアンプ接続順サーボアンプ接続順は、RC9ロボットコントローラとデイジーチェーンで接続されたサーボアンプの中で、設定軸をコントローラから見ての何番目のサーボアンプに対応させるかを決定するパラメータです。以下の図のようにサーボアンプが接続されている場合、次のような設定が可能です。
以下のように、J7とJ8の設定を入れ替えることも可能です。
サーボアンプ接続順の重複や、サーボアンプ接続順が小さい番号から順に設定されていない場合、意図しない軸が動作をすることがあります。 詳しくは、[サーボアンプパラメータの設定]をご参照ください。 |
エンコーダ分解能接続したサーボアンプで利用するエンコーダの分解能を指定します。 |
回生抵抗選択回生抵抗の状態を以下のいずれかから選択します。
|
回生抵抗値回生抵抗の抵抗値を設定します。 |
回生抵抗サーモスタット入力回生抵抗のサーモスタット入力のポートを設定します。 |
保持ブレーキ動作遅れ時間ブレーキ保持回路を利用した場合の、保持ブレーキ動作遅れ時間を設定します。 |
保持ブレーキ解除遅れ時間ブレーキ保持回路を利用した場合の、保持ブレーキ解除遅れ時間を設定します。 |
サーボアンプ接続順が正しく設定されていない場合、意図しない軸が動作を行う可能性があります。
5
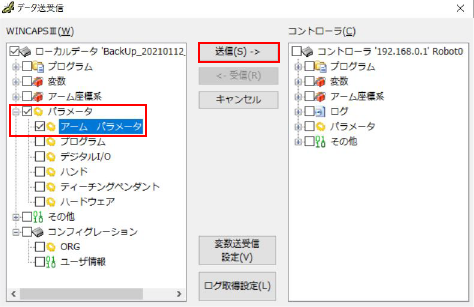
正しく設定を行った後、使用しているRC9ロボットコントローラへ、データ送受信を利用し、[アーム パラメータ]を送信します。
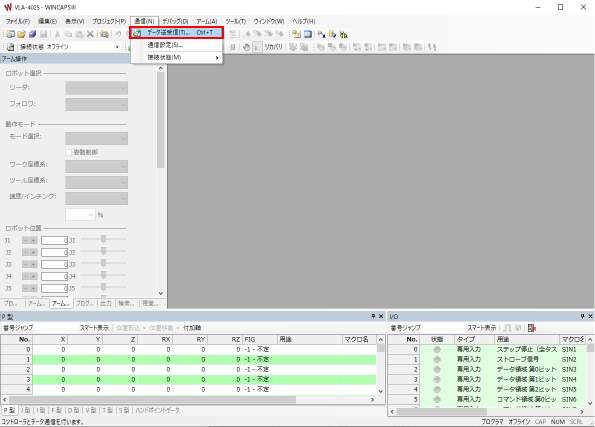
WINCAPSIIIの通信タブ内の、データ送受信を選択してください。
データ送受信画面の、[パラメータ]-[アーム パラメータ]を選択し、送信ボタンを押してください。
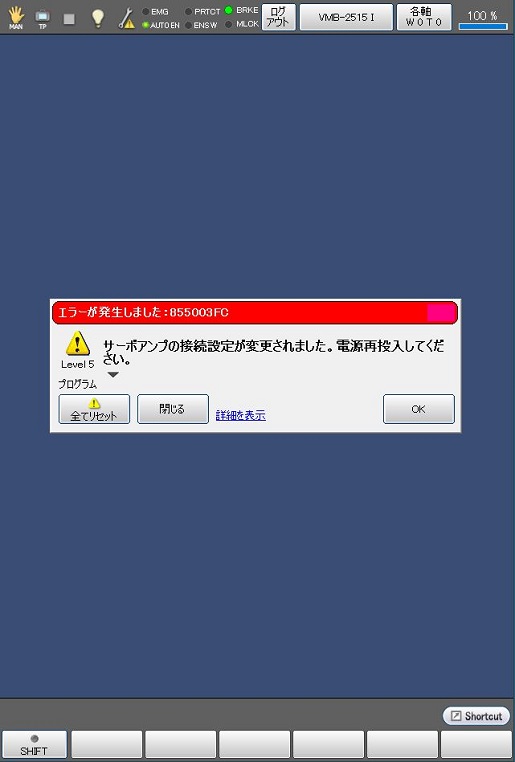
送信完了後、以下の画面がスマートTP上に表示されます。OKを押したのちに、RC9ロボットコントローラの電源を切ってください。
6
利用するサーボアンプをRC9ロボットコントローラへ接続してください。
接続方法はこちらをご覧ください。
7
サーボアンプを接続後、RC9ロボットコントローラの電源を投入してください。
ID : 10970