
ID : 10070
WINCAPSIIIの起動
プログラミング支援ツール "WINCAPSIII" を起動します。
1
[スタート]メニューの [すべてのプログラム] から [DENSO ROBOTICS] / [WINCAPSIII] / [WINCAPSIII]を選択します。
[WINCAPSIIIログイン]ダイアログを表示します。
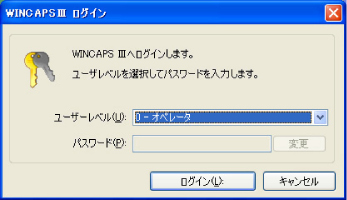
2
[ユーザレベル] は [1-プログラマ(プログラマレベル)]を選択し、パスワードを入力します。
パスワードは任意で設定できます。
パスワードの設定の方法は、WINCAPSIIIガイドの "パスワードを登録する" を参照してください。
[ログイン]ボタンをクリックします。
3
WINCAPSIIIが起動しました。
プロジェクトの新規作成
WINCAPSIIIでは、プロジェクトという単位で複数のプログラムを管理できます。
プロジェクト内で複数のプログラムを作成し、組み合わせて使用することにより、よりわかりやすく管理することができます。
プログラムを作成するにあたって、プロジェクトを新しく作成します。
プロジェクトの新規作成は、[WINCAPSIIIプロジェクト作成ウィザード]に従って行います。
プロジェクトの新規作成は下記の3種の方法で作成できます。
- ロボットタイプを選択して新規作成
ロボットが接続されていない状態の時の作成方法です。設備設計時など、ロボットが設置されていない状況で事前にプロジェクト作成する場合などに使用します。各種設定は接続するコントローラにあわせてください。設定があっていない場合は接続時にエラーが起きます。 - コントローラから情報を取得して新規作成
すでにロボットが設置されている場合など、ロボットコントローラ内のプロジェクトを読み込んでWINCAPSIIIのプロジェクトを作成します。 - RC9 USBデータから作成する
- プロジェクト名および保存場所
- ロボットタイプ
- コントローラオプションの選択
ここでは、基本的な操作の説明として [ロボットタイプを選択して新規作成]に沿ってプロジェクトを作成します。
1
[ファイル]メニューから [プロジェクトの新規作成]を選択します。
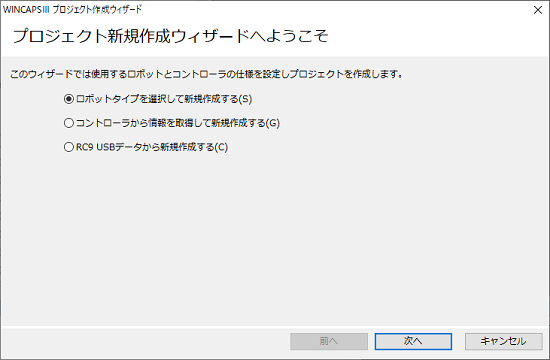
[WINCAPSIIIプロジェクト作成ウィザード]を起動します。
[ロボットタイプを選択して新規作成する]を選択し、[次へ]をクリックします。
ウィザードで設定する内容は、新規作成後に変更することができます。ただし、以下の項目については、変更ができないため、ウィザードの実行中に正しく設定してください。
2
プロジェクト名とプロジェクトの保存場所を入力し、[次へ]をクリックします。
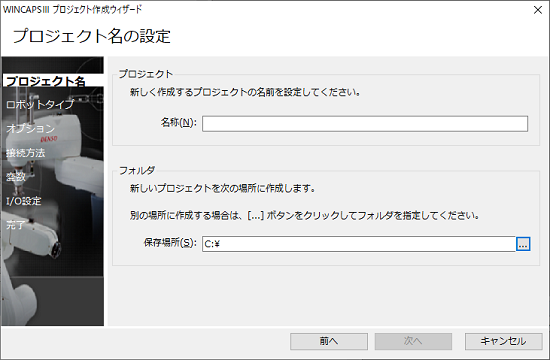
入力したプロジェクト名のフォルダが、指定した保存場所に作成されます。
[プロジェクト名の設定]で表示される保存場所は、WINCAPSIIIの基本設定で変更できます。WINCAPSIIIの基本設定については、"WINCAPSIIIの基本設定"を参照してください。
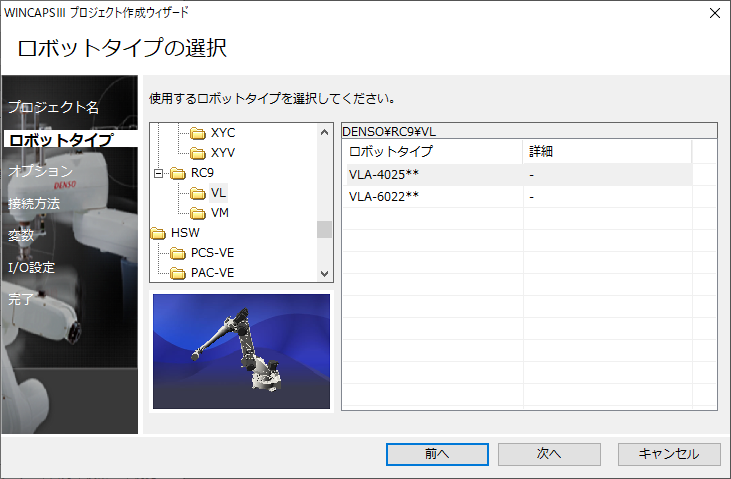
3
ご使用されるロボットコントローラおよびロボットタイプを選択し、[次へ]をクリックします。
4
コントローラオプションを選択します。
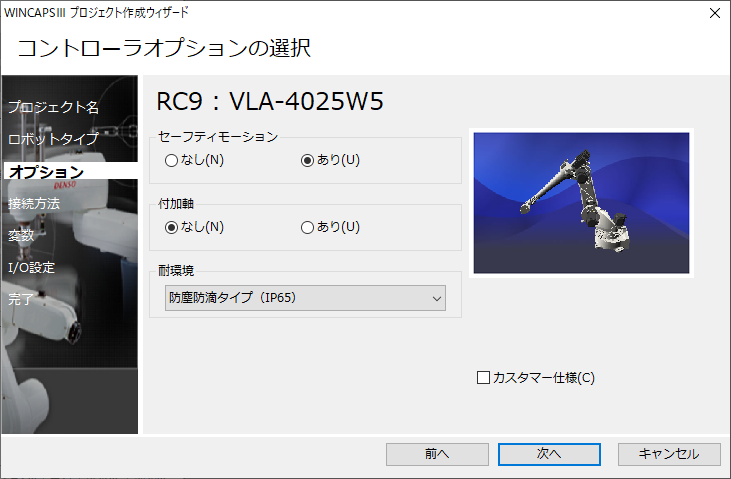
[コントローラオプションの選択]で表示される[カスタマー仕様]チェックボックスは通常のロボットではチェックを入れないでください。特別仕様のロボット(ロボット型式に"#"が付いています。)で使用します。
5
コントローラとPC(WINCAPSIII)との接続方法を入力します。
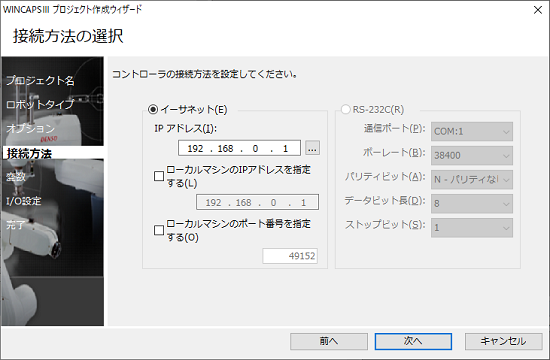
接続方法と詳細を入力し、[次へ]をクリックします。
接続方法の設定はプロジェクト作成後でも変更できます。
6
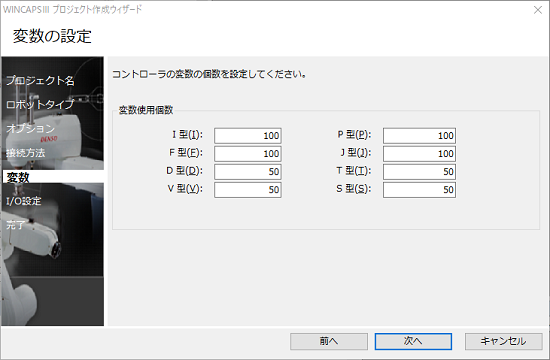
変数の使用個数を入力します。
変数の使用個数はプロジェクト作成後でも変更できます。
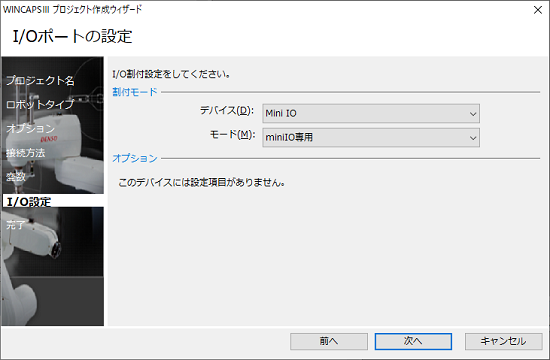
7
I/Oポートの設定を入力します。
I/Oポートの設定はプロジェクト作成後でも変更できます。
コントローラに取付けられているデバイスと割付モードを選択します。
必要に応じてデバイスの詳細設定を入力します。
[次へ]クリックします。
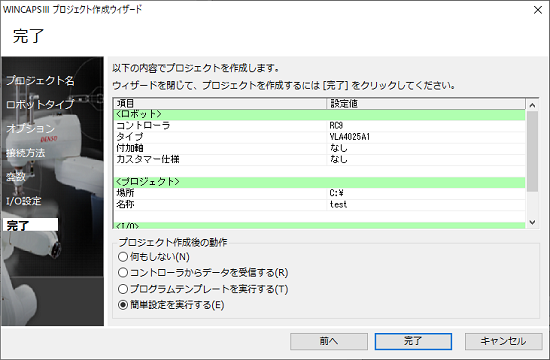
8
設定内容を確認します。
設定内容が正しければ[完了]をクリックし、ウィザードを終了します。
ID : 10070