
ID : 10951
ハードウェア接続構成
接続方法
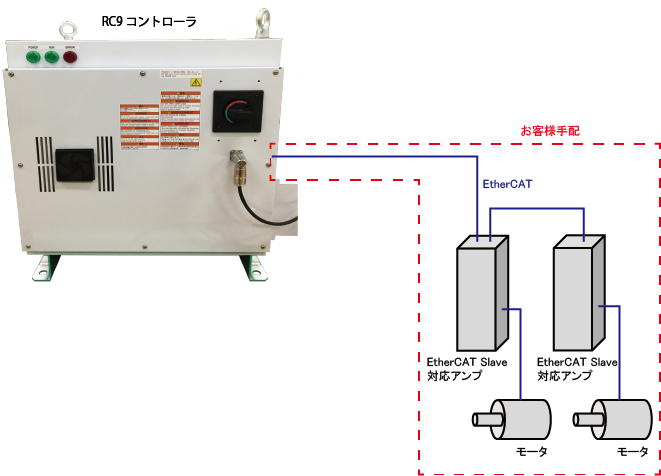
付加軸機能では、RC9ロボットコントローラとサーボアンプの接続にはEtherCATを利用します。
利用できるネットワークトポロジー(接続方式)は、下図のようなデイジーチェーンのみです。
デイジーチェーン接続中に、サーボアンプ以外をつながないようにしてください。
接続には、必ず「カテゴリー5e」以上を満たす、ツイストペアケーブルを利用してください。
サーボアンプ電源が入った状態で、RC9ロボットコントローラを再起動した場合、RC9がEtherCAT断線エラーを出力します。
これは、サーボアンプがRC9電源断のタイミングで、出力するEtherCAT断線エラーをRC9が受け取るために発生するものです。
そのため、RC9ロボットコントローラの電源断と同時にサーボアンプの電源断が行われるようしてください。
また、RC9ロボットコントローラの電源を入れる前に、サーボアンプの電源が入るようにしてください。
付加軸機能対応サーボアンプ
付加軸機能を利用したロボットシステムを構成するには、弊社指定のEtherCAT Slave対応サーボアンプを使用します。
付加軸機能対応アンプは以下の製品になります。
| メーカ | モデル名 | ベンダID | プロダクトコード |
|---|---|---|---|
| 山洋電気株式会社 | SANMOTION R 3E Model | 441 | 11 |
- 多軸アンプ
- リニアモータ
- インクリメンタルエンコーダ
対応アンプを利用した場合でも、以下のアンプ、モータは利用できません。
付加軸のブレーキ接続
付加軸に使用するモータのブレーキ解除に必要な電源は、モータのブレーキに必要な電源容量に合わせたものをご用意下さい。
SANMOTION R 3E Model用ブレーキ解除推奨回路
以下の機能を利用するために、ブレーキ解除推奨回路の配線が必要です。
- RC9ロボットコントローラからの付加軸モータの電源ON/OFFに連動したブレーキ動作
- スマートTPからの付加軸のブレーキ操作
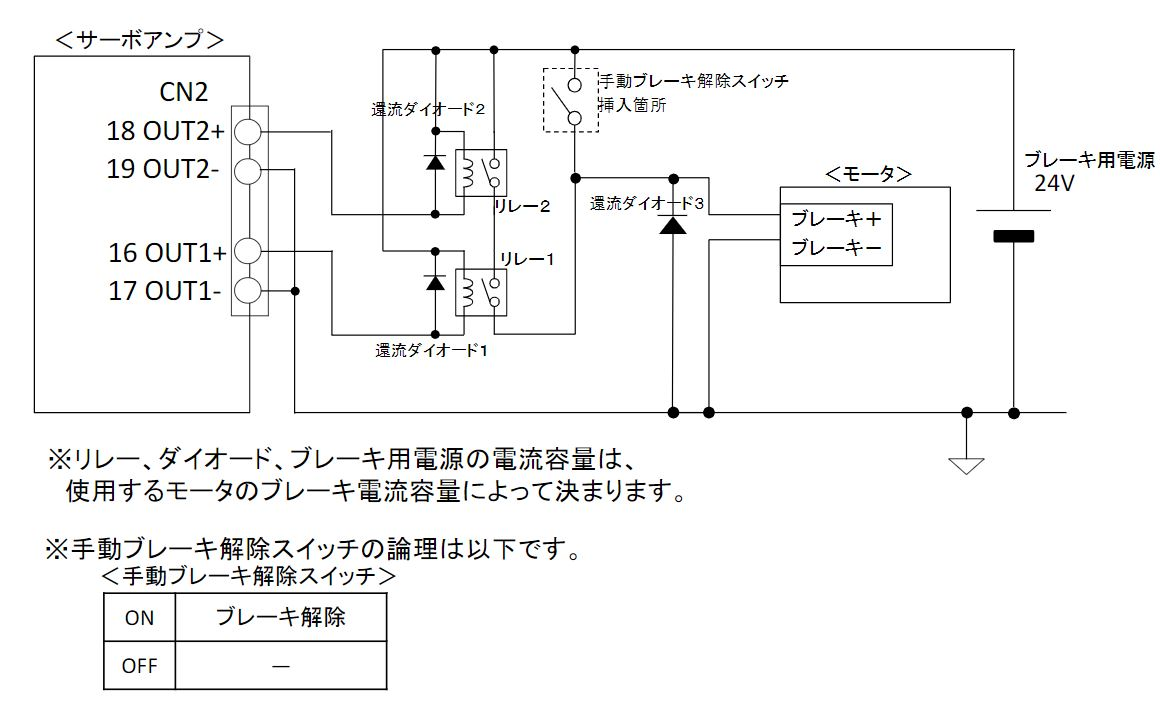
ブレーキ解除推奨回路を使用する際には,サーボアンプカスタム設定を無効にして利用して下さい。
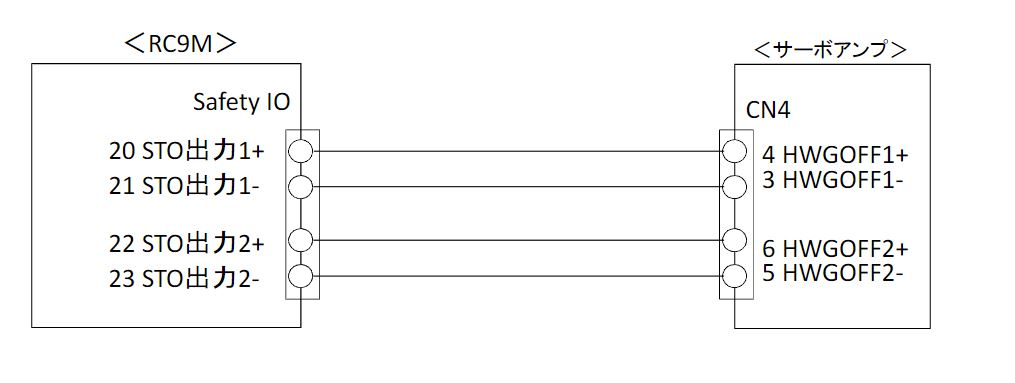
STO回路接続
SANMOTION R 3E Modelを利用する場合
ロボット軸と付加軸のSTO信号を同期させるには、以下のように、RC9からSTO信号線を付加軸アンプに接続してください。
上記のように、ロボット軸と付加軸のSTO信号を同期させている場合、以下の内容に注意してください。
駆動させる軸の[軌道設定]内、[最大回転加速度、加速時間 [ms]]のパラメータの設定値 が、非常停止等の入力から STO 信号出力までの時間 Tより長いと、以下の図のように、減速中に STO 機能が働くため、動作中にモータのブレーキを使用し急停止します。
が、非常停止等の入力から STO 信号出力までの時間 Tより長いと、以下の図のように、減速中に STO 機能が働くため、動作中にモータのブレーキを使用し急停止します。

STO信号出力までの時間Tは、ロボットごとに異なります。
| ロボット機種 | STO信号出力までの時間 |
|---|---|
| VMB | 600 ms |
| VLA | 1400 ms |
マニュアルリセットを実行した際に行われるSTO状態の解除タイミングでRC9とサーボアンプが同期されている場合、 駆動させる軸の[最大回転加速度、加速時間 [ms]]のパラメータの設定値をSTO 信号出力までの時間 Tより長くしたい場合、STO信号の信号線にオフディレイタイマー等の遅延回路を接続してください。
その際、遅延させる秒数は以下の式で計算してください。

ID : 10951