
ID : 10766
コマンド挿入機能
COBOTTAのアーム上のボタンを押した際に、設定に応じたコマンドを自動挿入するプログラム作成の支援機能です。スレーブコントロール設定の使用用途選択で "教示" を選択していた場合に使用できます。
挿入するコマンドは デフォルトコマンド と お客様が設定したテンプレートコマンドのどちらかを選択できます。
デフォルトコマンドの詳細は、下記の "デフォルトコマンド" をご覧ください。
お客様で挿入するコマンドを設定する場合は、"挿入するコマンドを編集する" をご覧ください。
操作方法
1
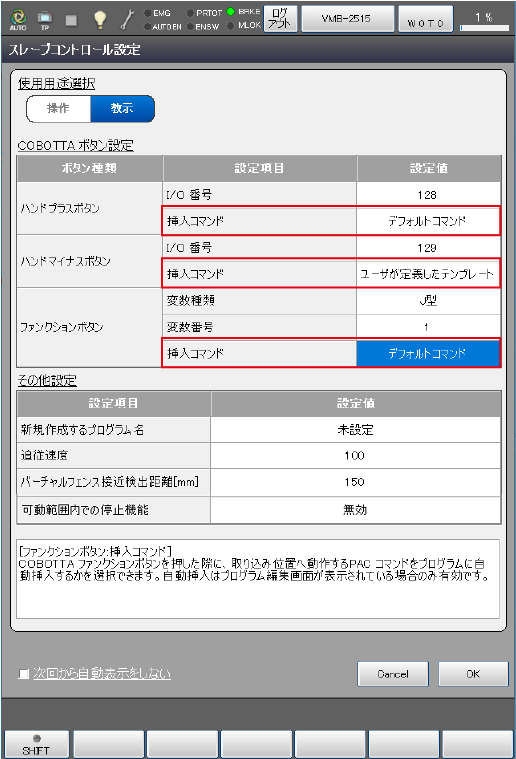
スレーブロボットのスレーブコントロール設定画面で各ボタンの[挿入コマンド]の設定値を "デフォルトコマンド" または "ユーザが定義したテンプレート" に設定します。
2
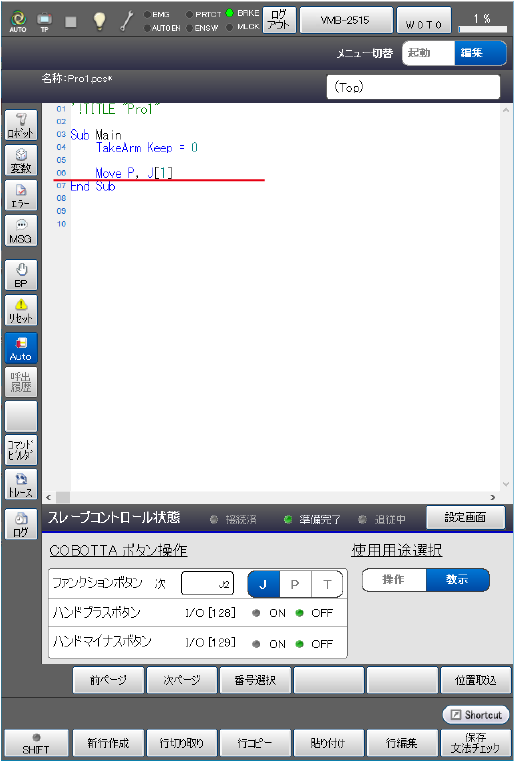
プログラム編集画面を表示した状態で、COBOTTAの各ボタンを押すと、設定されたコマンドが自動挿入されます。
コマンドは、カーソル行に挿入されます。
また、このときスマートTPの画面下部にスレーブコントロール状態が表示されていますので、状態の確認にご利用ください。
デフォルトコマンド
[挿入コマンド]で "デフォルトコマンド" を設定した場合は、下記のコマンドが挿入されます。
ハンドプラスボタン
"x" にはスレーブコントロール設定画面でハンドプラスボタンに設定したI/O番号が挿入されます。
設定したI/OがOFFの場合はSet、ONの場合はResetが挿入されます。
Delay 500
Set IO[X] or Reset IO[X]
Delay 500ハンドマイナスボタン
"x" にはスレーブコントロール設定画面でハンドマイナスボタンに設定したI/O番号が挿入されます。
設定したI/OがOFFの場合はSet、ONの場合はResetが挿入されます。
Delay 500
Set IO[X] or Reset IO[X]
Delay 500ファンクションボタン
"x" にはスレーブコントロール設定画面でファンクションボタンに設定した変数番号が挿入されます。
設定した変数の種類の型が挿入されます。
また、同時に設定した変数型の変数番号に現在位置を取り込みます。
1回ファンクションボタンを押すごとに、変数番号が1増加します。
Move P, @P P[X] or J[X] or T[X]挿入するコマンドを編集する
コマンド挿入機能では、お客様が設定したコマンドを挿入することができます。
お客様が設定するコマンドの編集手順を説明します。
ここで編集したコマンドを挿入する場合は、[挿入コマンド]を "ユーザが定義したテンプレート" に設定してください。
1
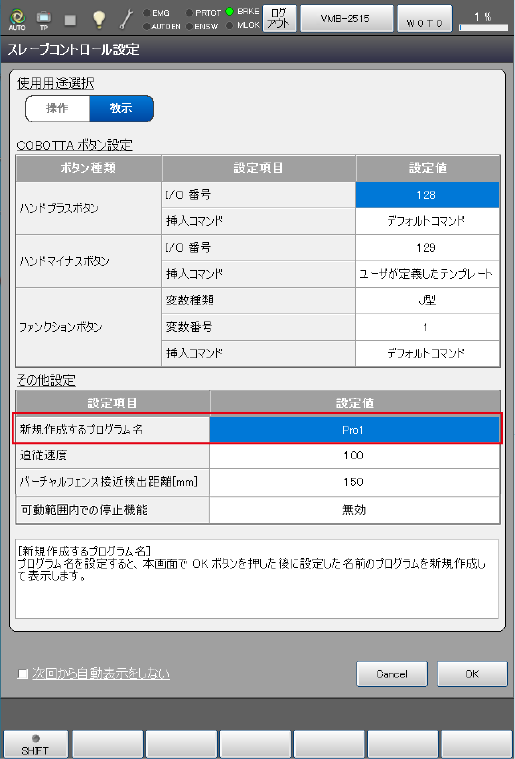
スレーブコントロール設定画面で "新規作成するプログラム名" にプログラム名を入力し、[OK]を押します。
新規作成プログラムと同じフォルダ階層に[AssistFunction]フォルダが生成されます。
既にAssistFunctionフォルダが存在する場合は、生成されません。
2
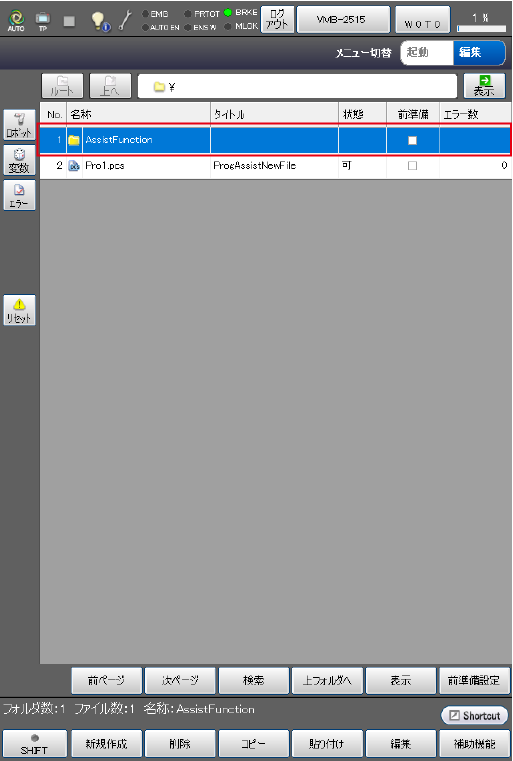
プログラム一覧画面で[AssistFunction]フォルダを押します。
3
各ボタンに対応するプログラムを編集します。
デフォルトでは、デフォルトコマンドと同様のコマンドが挿入されるようにプログラムされています。
- ButtonTemplate1.pcs : ハンドプラスボタン
- ButtonTemplate2.pcs : ハンドマイナスボタン
- ButtonTemplate3.pcs : ファンクションボタン
ファイルの格納場所やファイル名を変更した場合は、コマンドを自動挿入するプログラムの#Includeを変更する必要があります。
ID : 10766