
ID : 9645
負荷推定機能
負荷推定機能とは、ロボットに特定の動作を行わせることで、先端負荷の質量と重心を推定する機能です。この機能は簡単設定の "先端負荷質量" と "先端負荷重心" の入力時に使用することができます。
測定結果は実際の値と異なる可能性があります。CADや計算等で先端負荷の正確な値が分かる場合は、負荷推定機能を使用せずに、その値を使用してください。
測定時の動作概要
測定対象に応じて、1~3通りの動作経路でロボットが動作します。
各動作経路で低速動作と高速動作を行うため、低速動作時に設備との干渉がないかを確認してください。
低速動作時は、高速動作時の10%の速度、加速度で動作を行います。
測定動作中は、フランジ(メカニカルインタフェース)およびTCP点において250mm/sを上回る速度になる場合があります。
測定時の最大移動量
測定時はロボットが自動で動作します。
[+]方向に移動後、もとの位置に戻ります。
先端負荷質量
| 動作軸 | 動作1 | |
|---|---|---|
| 動作開始位置 | 移動量 | |
| J3 | 90° | 1° |
| J5 | 0° | 1° |

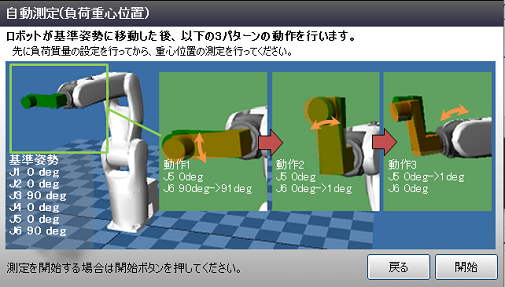
負荷重心位置
| 動作軸 | 動作1 | 動作2 | 動作3 | |||
|---|---|---|---|---|---|---|
| 動作開始位置 | 移動量 | 動作開始位置 | 移動量 | 動作開始位置 | 移動量 | |
| J5 | 0° | - | 0° | - | 0° | 1° |
| J6 | 90° | 1° | 0° | 1° | 0° | - |
操作方法
各測定の操作方法は下記を参照してください。
- 自動測定を行う際は、先端負荷質量→負荷重心位置の順番で測定を行ってください。順番が異なると正しい測定値が得られない可能性があります。
- 先端負荷質量、重心位置の計算値が分かる場合、その値を設定してください。自動測定を行なう必要はありません。
ID : 9645
- このページに関連する情報
- 先端負荷質量自動測定
- 負荷重心位置自動測定