
ID : 10892
床置き、天吊り設定
ロボットを床置きで使用する場合と、天吊り、壁掛け、傾斜面(任意角度)で使用する場合では、最適な運転条件が異なります。床置き、天吊り設定では、実際のロボットの設置状況と一致するように設定を行います。
設置条件
工場出荷時は、"床置き"に設定されています。
また、ロボットの機種により設置可能な条件が異なります。下表を参照してください。
| 床置き | 天吊り | 壁掛け 下 | 壁掛け 左 | 壁掛け 右 | 任意角度 | |
|---|---|---|---|---|---|---|
| VMB-2515 | ● | ● | ● | ● | ● | ● |
| VMB-2518 | ● | ● | ● | ● | ● | ● |
| VLA-4025 | ● | ● | - | - | - | ● |
| VLA-6022 | ● | ● | - | - | - | ● |
傾斜角度を設定する場合は、ロボットが前傾になる回転方向 (ロボット座標系のRy) の設定値をプラスの傾斜角度に設定してください。
- VMBシリーズロボットの場合
- VMBシリーズロボットの設置可能角度は、0°~180°です。
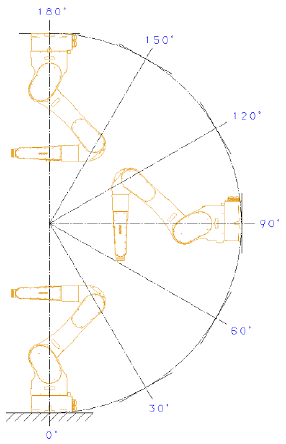
- VLAシリーズロボットの場合
- VLAシリーズロボットの設置可能角度は、0°~45°および135°~180°です。
ロボットの左右方向の回転 (ロボット座標系のRx) の設定値で使用したい場合は、弊社営業にお問い合わせください。
設定方法
ここでは例として、VMBシリーズロボットを傾斜面(任意角度)に設置した場合の設定方法を説明します。
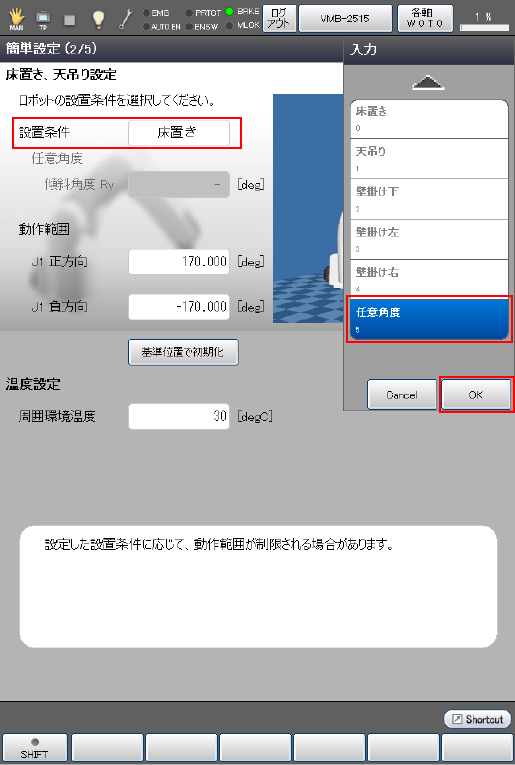
1
設置条件で"任意角度"を選択し、[OK]を押します。
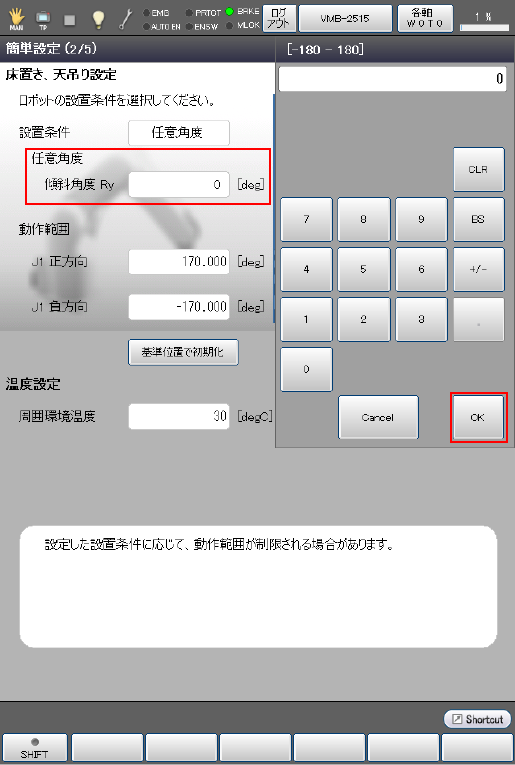
2
任意角度を入力して[OK]を押します。
任意角度は設置条件が"任意角度"の場合のみ設定します。"床置き"、"天吊り"、"壁掛け"の場合は不要です。
3
設置条件、任意角度を設定すると、"動作範囲"情報が更新されます。
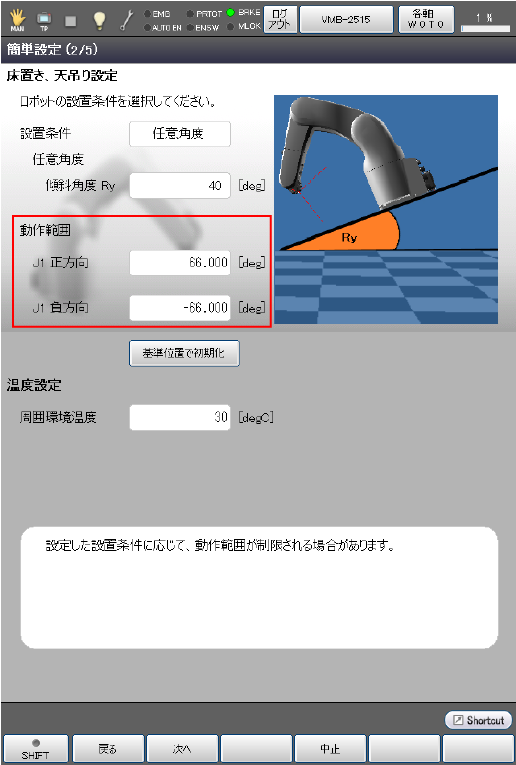
設置条件に"壁掛け"、"傾斜角度"を選択した場合、1軸の動作範囲が制限されます。
安全のためにロボットの1軸に可変メカストッパを取り付けてください。破損を予防できます。
取り付け時の動作範囲基準は"動作範囲"の情報を参考にしてください。
VLAシリーズロボットで20°以上の傾斜角度を設定している場合、WINCAPSIIIからデフォルトのユーザパラメータを送信すると、送信時にエラーが発生します。
ID : 10892