
ID : 9644
簡単設定(スマートTP)
実際の使用環境に合わせた各種設定をすることで、ロボットを最適状態で使用することができます。この機能を使うと、その設定を簡単に行うことができます。
WINCAPSIIIでの操作手順は "簡単設定(WINCAPSIII)" を参照してください。
設定項目
- 床置き、天吊り設定
- 温度設定
- 先端負荷質量[g]
- 負荷重心位置X[mm]
- 負荷重心位置Y[mm]
- 負荷重心位置Z[mm]
- 負荷重心イナーシャIx[kgcm^2]
- 負荷重心イナーシャIy[kgcm^2]
- 負荷重心イナーシャIz[kgcm^2]
操作手順
1
コントローラ起動時に簡単設定画面が表示されます。
この画面では設定する項目と、現在設定されている値を確認することができます。確認したら[F2 次へ]を押します。
WINCAPSIIIで簡単設定する場合は、[F4 中止]を押します。
2
[床置き、天吊り設定] と [温度設定]を行います。
- 設置条件 : 入力欄で設置条件を選択し、[OK]を押します。
- 周辺環境温度 : 入力欄を選択し、値を入力し[OK]を押します。
完了したら[F2 次へ]を押します。
各項目の設定画面で[F1 戻る]を押すと、前の項目の設定画面に戻ります。
3
[先端負荷質量] と [負荷重心位置] の設定を行います。
- 先端負荷質量 : 入力欄を選択し、値を入力し[OK]を押します。
- 負荷重心位置 : 入力欄を選択し、各重心位置の値を入力し[OK]を押します。
完了したら[F2 次へ]を押します。
4
[負荷重心イナーシャ]を設定します。
入力欄を選択し、各軸回りの値を入力し[OK]を押します。
詳細は、"先端負荷イナーシャの計算について" を参照してください。
完了したら[F2 次へ]を押します。
5
設定した内容を確認して[完了]を押します。今まで設定した各項目の値がコントローラに保存されます。
以上で操作は終了です。
簡単設定の中止
各項目の設定画面で[F4 中止]を押すと、簡単設定を途中で中止することができます。[OK]を押すと中止します。中止すると、それまでに設定した各項目の値は保存されません。
中止の画面では、次回起動時に簡単設定を表示するかしないかを選択できます。
メニューから簡単設定を起動した場合は、[F4 中止]を押しても次回起動時に簡単設定を表示するかしないかの項目は表示されません。
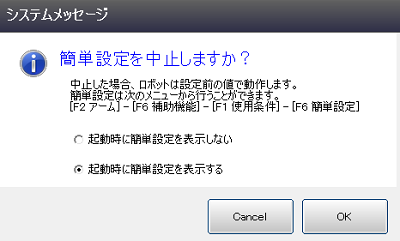
設定内容の変更
いったん設定した内容を変更したい場合は、基本画面[F2 アーム] - [F6 補助機能] - [F1 使用条件] - [F6 簡単設定]より行うことができます。
ID : 9644