
ID : 18028
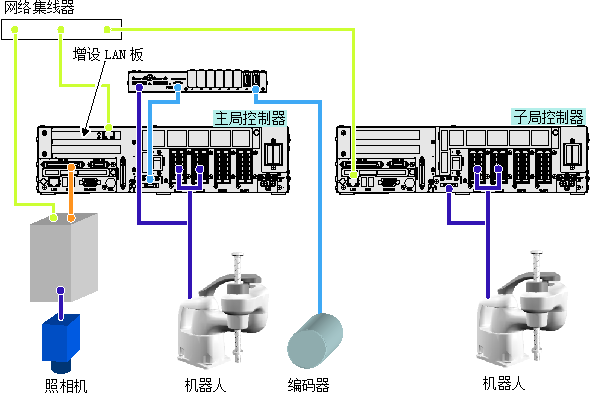
使用增设的LAN板进行主局与子局之间的通信时
如下图所示,使用增设LAN板,进行主局与子局之间的通信时,需要更改“组播.接口[IP Address]”这一参数的初始值。
将针对增设LAN板设定的IP地址直接输入“组播.接口[IP Address]”。
首先,说明增设LAN板的IP地址的设定方法。
增设LAN板的IP地址的设定方法
如果按照以下的操作路径进行操作,显示下图的[通信设定]视窗。
操作路径: [F6 设定] - [F5 通信与启动权] - [F2 网络与通信权] |
针对使用了双臂控制功能的机器人控制器进行设定时,选择Robot0和Robot1中的哪一个都没有问题。此设定在Robot0和Robot1上是共通的设定。
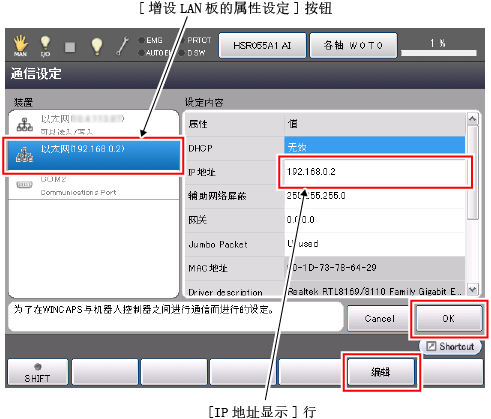
如果安装了增设LAN板,显示上图的[增设LAN板的属性]。按该按钮,更改右侧的[设定内容]框中的IP地址。
要进行更改,首先选择[IP地址显示]行。[IP地址显示]行被标记为蓝色。如果在该状态按[F5 编辑],显示[IP地址输入]视窗,在此输入IP地址后,按[IP地址输入]视窗的[OK]按钮。
最后,按[通信设定]视窗自身的[OK]按钮。
“组播.接口[IP Address]”的设定方法
要设定“组播.接口[IP Address]”,将用户级别设为“维护”,按照以下的操作路径进行操作,显示下图的[传送带跟踪]视窗。
操作路径:[F10 跟踪]-[F12 详细] |
针对使用了双臂控制功能的机器人控制器进行设定时,选择Robot0和Robot1中的哪一个都没有问题。此设定在Robot0和Robot1上是共通的设定。
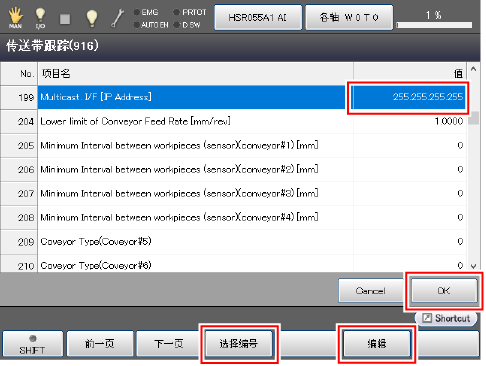
在[传送带跟踪]视窗选择“组播.接口[IP Address]”。由于“组播.接口[IP Address]”是第199个参数,因此如果在[F3 编号选择]中指定199,可直接选择“组播.接口[IP Address]”。
然后,如果按[F5 编辑],显示[IP地址输入]视窗,针对增设LAN板输入设定的IP地址。
按[IP地址输入]视窗的[OK]按钮后,最后按[传送带跟踪]视窗自身的[OK]按钮。
设定“组播.接口[IP Address]”的机器人控制器
请针对安装了增设LAN板的机器人控制器,进行“组播.接口[IP Address]”的设定。在开头的图上,由于安装在主局控制器上,因此针对主局控制器进行设定。如果安装在子局控制器上,则针对子局控制器进行设定。
ID : 18028