
ID : 7716
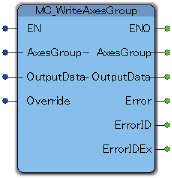
MC_WriteAxesGroup
将机器人变量的内容发送到机器人控制器。另外,变更机器人控制器的外部速度。
| 图形显示 | FB范畴 | |
|---|---|---|
 |
特殊 | |
输入输出变量
| 变量名 | 数据型 | 有效范围 | 初始值 | 省略 |
|---|---|---|---|---|
| AxesGroup | eRC_AxesGroup | 不可以 | ||
|
||||
| OutputData | ARRAY[1..64] of DWORD | 不可以 | ||
|
||||
输入变量
| 变量名 | 数据型 | 有效范围 | 初始值 | 省略 |
|---|---|---|---|---|
| Override | INT | 1~100 | 1.0 | 可以 |
|
||||
输出变量
| 变量名 | 数据型 / 说明 |
|---|---|
| Error | BOOL |
|
|
| ErrorID | WORD |
|
|
| ErrorIDEx | DWORD |
|
功能说明
将机器人变量(结构体:eRC_AxesGroup)的内容发送到机器人控制器。
实际上,将在机器人变量 (结构体: eRC_AxesGroup)中的变量“Cmd”发送给机器人控制器。
为OutputData指定通过现场网络的通信设定生成的输出标签。
现场网络通信的设定方法因各PLC而异。请参照您所使用的PLC的使用说明书。
注意事项
通过Command-Slave的其他FB更新的变量"Cmd"(*1) 的值,使用这个FB发给机器人控制器。如果变量"Cmd"的值没有发给机器人控制器,无法控制机器人。
因此,请将该FB配置在程序最后。
*1:变量“Cmd”是位于机器人变量(结构体: eRC_AxesGroup)中的变量。
ID : 7716