
ID : 7647
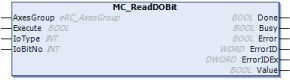
MC_ReadDOBit
获取机器人控制器的I/O输出信号的状态。(Bit)
| 图形显示 | FB范畴 |
|---|---|
 |
非动作 |
输入输出变量
| 变量名 | 数据型 | 有效范围 | 初始值 | 省略 |
|---|---|---|---|---|
| AxesGroup | eRC_AxesGroup | 不可以 | ||
|
||||
输入变量
| 变量名 | 数据型 | 有效范围 | 初始值 | 省略 |
|---|---|---|---|---|
| Execute | BOOL |
|
FALSE | 不可以 |
|
||||
| IoType | INT | 0.1 | 0 | 不可以 |
|
||||
| IoBitNo | INT |
|
0 | 不可以 |
|
||||
输出变量
| 变量名 | 数据型 / 说明 |
|---|---|
| Done | BOOL |
|
|
| Busy | BOOL |
|
|
| Error | BOOL |
|
|
| ErrorID | WORD |
|
|
| ErrorIDEx | DWORD |
|
|
| Value | BOOL |
|
功能说明
获取机器人控制器的I/O输出信号的状态。
下面是Bit编号和机器人控制器的端口编号的对应表。
- Hand I/O
IoBitNo 机器人控制器 端口编号 机器人控制器 I/O名称 0 64 夹治具输出 1 65 夹治具输出 2 66 夹治具输出 3 67 夹治具输出 4 68 夹治具输出 5 69 夹治具输出 6 70 夹治具输出 7
71 夹治具输出 - Mini I/O
IoBitNo 机器人控制器 端口编号 机器人控制器 I/O名称 0 16 CPU正常 1 17 通用输出 2 18 通用输出 3 19 通用输出 4 20 通用输出 5 21 通用输出 6 22 通用输出 7
23 通用输出 8 24 通用输出 9 25 通用输出 10 26 通用输出 11 27 通用输出 12 28 通用输出 13 29 通用输出 14 30 通用输出 15 31 通用输出
注意事项
-
ID : 7647