
ID : 7587
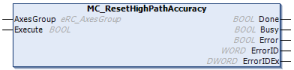
MC_ResetHighPathAccuracy
将高轨迹控制功能设为无效。
| 图形显示 | FB范畴 |
|---|---|
 |
动作 |
输入输出变量
| 变量名 | 数据型 | 有效范围 | 初始值 | 省略 |
|---|---|---|---|---|
| AxesGroup | eRC_AxesGroup | 不可以 | ||
|
||||
输入变量
| 变量名 | 数据型 | 有效范围 | 初始值 | 省略 |
|---|---|---|---|---|
| Execute | BOOL |
|
FALSE | 不可以 |
|
||||
输出变量
| 变量名 | 数据型 / 说明 |
|---|---|
| Done | BOOL |
|
|
| Busy | BOOL |
|
|
| Error | BOOL |
|
|
| ErrorID | WORD |
|
|
| ErrorIDEx | DWORD |
|
功能说明
高轨迹控制功能是指可提高机器人动作轨迹精度的功能。特别是在高速时的圆弧动作或自由曲线插补动作中提高动作轨迹的精度。进行密封涂抹等作业时,利用高轨迹控制功能可进行稳定作业。
注意事项
若要执行这个FB,需要事先将FB范畴"动作"的FB设为可执行状态。
若要将FB范畴"动作"的FB设为可执行状态,使用FB"MC_Power"。
ID : 7587