
ID : 7382
MC_PalletTargetPosition
指定托板的条件,通过该条件指定从第几层的开头起的第几号,可获取该位置。
| 图形显示 | AOI范畴 |
|---|---|
 |
非动作 |
输入输出变量
| 变量名 | 数据型 | 有效范围 | 输入输出条件 |
|---|---|---|---|
| AxesGroup | eRC_AxesGroup | - | |
|
|||
| PalletTargetPosition | eRC_Position | 输出用 | |
|
|||
输入变量
| 变量名 | 数据型 | 有效范围 |
|---|---|---|
| Execute | BOOL |
|
|
||
| VerticalSplit | INT | 1以上 |
|
||
| HorizontalSplit | INT | 1以上 |
|
||
| PalletHeights | REAL | - |
|
||
| PalletCornersP1No | INT | 0以上 |
|
||
| PalletCornersP2No | INT | 0以上 |
|
||
| PalletCornersP3No | INT | 0以上 |
|
||
| PalletCornersP4No | INT | 0以上 |
|
||
| PalletTargetPosNo | INT | 1 - (纵分割*横分割) |
|
||
| StackedNo | INT | 1以上 |
|
||
输出变量
| 变量名 | 数据型 / 说明 |
|---|---|
| Done | BOOL |
|
|
| Busy | BOOL |
|
|
| Error | BOOL |
|
|
| ErrorID | INT |
|
|
| ErrorIDEx | DINT |
|
功能说明
指定托板的条件,通过该条件指定从第几层的开头起的第几号,可获取该位置。
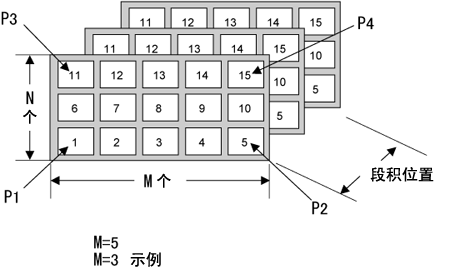
使用P1_P3分割数(N)、P1_P2分割数(M)、托板高度、托板四角位置(P1~P4)指定托板的条件。
托板的位置编号如图所示:从P1开始向P2排列,到达P2后,沿P1到P3方向从+1的位置横向排列。
注意事项
-
ID : 7382