
ID : 5621
搬运
就机器人本体的搬运方法进行说明。
- 搬运、安装机器人时,请务必阅读“安全注意事项”中的“安装注意事项1”和本章内容。
- 请勿附带机器人本体的电缆部分。否则会造成损坏。
- Y轴及拆下动作防止用螺栓的S轴进行无制动器移动。注意手和手指不要夹入轴或电缆支架。
根据机器人类型,从包装箱取出的姿势、搬运姿势不同。参照下述内容进行搬运。
| 机器人类型 | 最大质量 | 参照 |
|---|---|---|
| LZNN、LZZN | 9kg | LZ** 机器人取出、搬运姿势 |
| LYZN、LYZZ | 12kg | LYZ* 机器人取出、搬运姿势 |
| LSNN、LSSN | 13kg | LS** 机器人取出、搬运姿势 |
| LZSN、LZSS | 16kg | LZS* 机器人取出、搬运姿势 |
搬运方法
- 确认处于可设置状态。
- 开箱时,机器人本体为朝上状态。参照下图的“取出姿势”取出。取出后,参照“搬运姿势”更换并进行搬运。
- 应充分确保路径通畅,无障碍物或危险状况。
- 参照“设置”,将机器人固定在架台上。
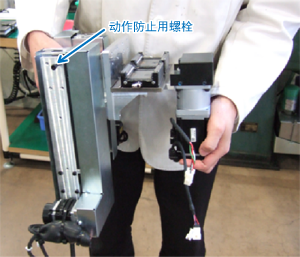
【仅S轴】 - 请拆下S轴的动作防止用螺栓。参照LS** 取出姿势 蓝色箭头标记。
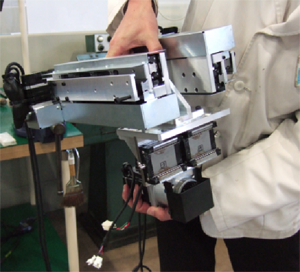
机器人取出、搬运姿势
LZ** 机器人取出、搬运姿势
取出姿势
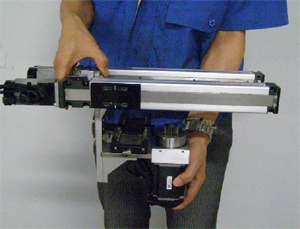
搬运姿势

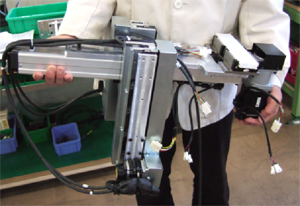
LYZ* 机器人取出、搬运姿势
取出姿势
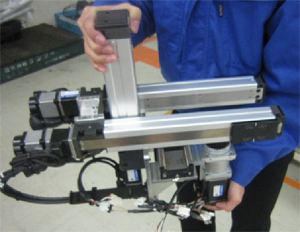
搬运姿势
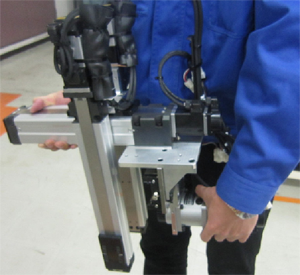
LS** 机器人取出、搬运姿势
取出姿势
搬运姿势
将机器人固定在架台上后,拆下S轴的动作防止用螺栓。
LZS* 机器人取出、搬运姿势
取出姿势
搬运姿势

将机器人固定在架台上后,拆下S轴的动作防止用螺栓。
ID : 5621