
ID : 5620
架台示例
搬运机器人的架台示例如下所示。
可调整安装面的高度。调整时使安装面的平面度保持0.1/500mm。
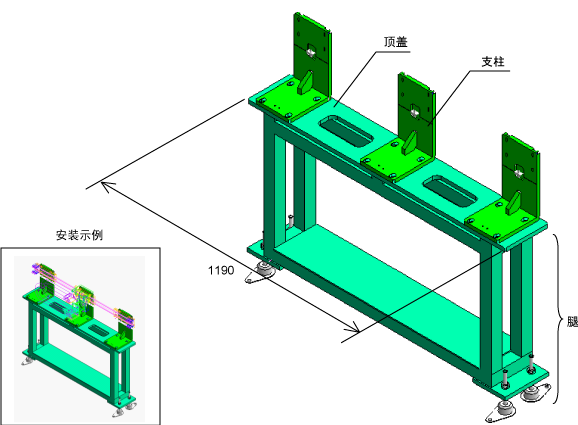 |
行程1200mm的架台参考图如下所示。
上述参考图中使用的零部件如下所示。
| 选件名 | 型式 | 数量 | 制造商 |
|---|---|---|---|
| 调节器衬垫 | FJKN16-130 | 4 | (株)Misumi公司制造 |
| 四角螺母 | FK2T16-A75-P59 | 6 | (株)Misumi公司制造 |
| 调整螺丝用挡块 | TSE6-8 | 3 | (株)Misumi公司制造 |
| 定位螺栓 | STBCM6-30 | 3 | (株)Misumi公司制造 |
| 六角带孔螺栓 | TA-B2-4X16 | 6 | (株)MEINAN公司制造 |
| 六角带孔螺栓 | TA-B2-6X22 | 12 | (株)MEINAN公司制造 |
| 六角带孔螺栓 | TA-B2-8X22 | 12 | (株)MEINAN公司制造 |
| 六角带孔螺栓 | TA-B2-10X20 | 6 | (株)MEINAN公司制造 |
| 长孔用垫圈 | WS-S-6 | 12 | (株)MEINAN公司制造 |
| 长孔用垫圈 | WS-S-8 | 12 | (株)MEINAN公司制造 |
支柱位置
为将导轨单元固定到支柱上,需要将支柱位置提前对准导轨单元的固定位置。导轨单元的固定位置因导轨长度而不同。详细内容请参照“导轨单元的固定螺栓位置 (PDF:114KB)”。
- 如果机器人高速运行,则会对安装架台施加较大的反作用力。保持足够的刚性,以防由于反作用力导致架台振动或错位。另外,将其它大质量设备与机器人架台进行机械式组装也可有效防止振动或错位。
- 有些架台可能在机器人动作时产生共振音(轰鸣音)。共振音较大时,提高架台的刚性或调整机器人的速度。
ID : 5620