
ID : 5531
法线矢量计算功能
功能概要
在使用垂直多关节机器人进行斜方向取出、投放作业中,经常使用该功能。但是,通过教导决定斜面的相对垂直度的作业非常困难。
法线矢量计算功能通过教导平面上的3个点,计算出垂直于该平面的矢量。通过将该矢量作为近似矢量,可能无需进行姿势的教导或可简单实现斜方向的作业。
说明
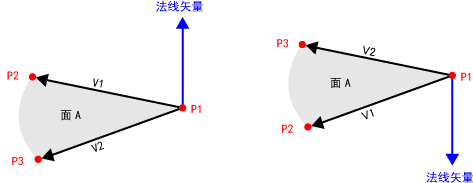
如下图所示,将垂直于由2个矢量(V1、V2)组成的A面的矢量称为法线矢量。可通过矢量V1、V2的外积求取法线矢量。
如下图所示教导P1~P3的3个点,并使用NormalVector指令,即可计算法线矢量。有关指令的使用方法,请参照程序员手册的NormalVector指令。
ID : 5531